Unit - 4
Design of Digital filters
Q1) Design a Chebyshev type 1 low pass filter to satisfy the following amplitude specifications: 
A1) Using the design formula for N
N = [2.08]=3
Note: 
The normalized system function is

With poles at

To frequency scale  let
let
So in the z domain

Note that when the design originates from discrete time specifications the poles of H (z) are independent of  .
.
Q2) Design a digital filter for given specifications cut-off frequency =30Hz, sampling frequency=150Hz. The filter should be HPF.
A2) First order transfer function of LPF is
Step 1: HL(s) = 
Step 2: Prewrap critical frequency
Ωp = tan(ωp Ts/2)= tan[(30x2xπ)/(2x150)] =0.7265
Step 3: Using LPF to HPF Transformation equation
HH(s) = HL(s) =  =
=  =
= 
For LPF
H(z) = HH(s) for s= 
HH(s) = = 0.5792 [
= 0.5792 [  ]
]
Q3) Design a BPF with pass band of 200-300 Hz, sampling frequency 2000Hz and filter order 2.
A3)
STEP 1: Passband edge frequency ω1 =200Hz
ω2= 300Hz
STEP 2: Prewrap critical frequency
Ω1 = tan(ω1 Ts/2)= tan(200xπ/2000) = 0.3249
Ω2 = tan(ω2 Ts/2)= tan(300xπ/2000) = 0.5095
STEP 3:  = Ω1 Ω2 = 0.3249 x 0.5095 = 0.1655
= Ω1 Ω2 = 0.3249 x 0.5095 = 0.1655
W = Ω2 – Ω1 = 0.5095-0.3249 = 0.1846
STEP 4:HB(s) = HL(s) for s = S= 
For LPF
H(z) = 
HB(s) =  =
=  =
= 
STEP 5: Replace s by 
HB(s) =
H(z) = 0.1367 [  ]
]
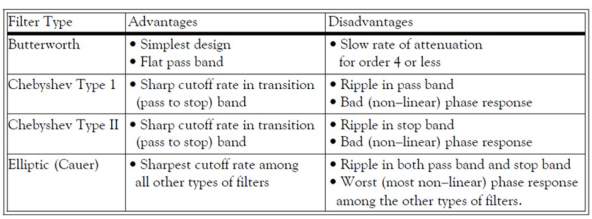
Q4) List the advantages and disadvantages of various digital filters?
A4)
Q5) Explain Decimation in multirate signal processing?
A5) Decimation, or down-sampling, consists of reducing the sampling rate by a factor M, cf. Figure 1. Here, the output is defined as
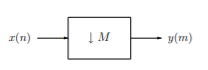
Fig 1 Decimation by factor M
y(m) = x(mM)
i.e., it consists of every Mth element of the input signal. It is clear that the decimated signal y does not in general contain all information about the original signal x. Therefore, decimation is usually applied in filter banks and preceded by filters which extract the relevant frequency bands.
In order to analyze the frequency domain characteristics of a multirate processing system with decimation, we need to study the relation between the Fourier transforms, or the z-transforms, of the signals x and y. For simplicity we consider the case M = 2 only. Then the decimated signal y is given by
y(m) = x(2m)
 given the z-transforms of
given the z-transforms of 

z-transform of y(m) is given by


For finding the z-transform of y decimation is done in two stages as shown below

The above signal has z-transform as


The Fourier transform of the decimated signal y(m) is related to z-transform by

But 

Where X is the Fourier-transform of the sequence {x(n)}. But from the properties of the Fourier transform (periodicity and symmetry) it follows that X(ω/2 + π) = X(ω/2 − π) = X(π − ω/2)∗ . Hence

The Fourier-transform of {y(m)} thus cannot distinguish between the frequencies ω/2 and π − ω/2 of {x(n)}. This is equivalent to the frequency folding phenomenon occurring when sampling a continuous-time signal. Hence, whereas the signal {x(n)} consists of frequencies in [0, π], the frequency contents of the decimated signal {y(m)} are restricted to the range [0, π/2]. Moreover, after decimation of the signal {x(n)}, its frequency components in [0, π/2] cannot be distinguished from the frequency components in the range [π/2, π].
Q6) Explain interpolation in multirate sampling?
A6) Expansion, or up-sampling, consists of increasing the sampling rate by a factor L, cf. Figure below. Here, the output is obtained by inserting L-1 zeros between successive values of the input x(n)
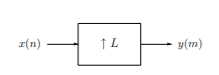
Fig 2 Interpolation by factor L
The expansion operation followed by interpolation leads to a representation of the signal x at a sampling rate increased by the factor L. The expanded signal {y(m)} has the z-transform

The Fourier Transform is

The transform Y (ω) at a given frequency ω ∈ [0, π] is thus equal to X(ωL), where ωL ∈ [0, Lπ]. But as the Fourier-transform is periodic with period 2π, we have X(ωL) = X(ωL + 2πk) = X((ω + 2πk L )L), and it follows that Y (ω) = Y (ω + 2πk L ). Hence Y (ω) is periodic, with L repetitions of X(ω) in the frequency range [0, 2π]. For example, for L = 2, we have X(2ω) = X(2ω − 2π) = X(2π − 2ω) ∗ = X(2(π − ω))∗ . Hence, for L = 2,

And Y (ω) is therefore uniquely defined by its values in the frequency band [0, π/2]. In order to reconstruct the correct interpolating signal at the higher sampling rate, an interpolating filter has to be introduced after the expansion. This is equivalent to the situation in D/A conversion, where a low-pass filter is used after the hold function.
Q7) Explain the windowing technique used in FIR filter design?
A7) Let the frequency response of the desired LTI ststem we wish to approximate be given by

Where  is the corresponding impulse response.
is the corresponding impulse response.
Consider obtaining a casual FIR filter that approximates  by letting
by letting

The FIR filter then has frequency response

Note that sibce we can write

We are actually forming a finite Fourier series approximation to 
Since the ideal  may contain discontinuities at the band edges, truncation of the Fourier series will result in the Gibbs phenomenon.
may contain discontinuities at the band edges, truncation of the Fourier series will result in the Gibbs phenomenon.
To allow for a less abrupt Fourier series truncation and hence reduce Gibbs phenomenon oscillations, we may generalize h [n] by writing

Where  is a finite duration window function of length M +1.
is a finite duration window function of length M +1.
Q8) Explain step by step the Park-McCllean’s algorithm for FIR filter design?
A8) The Parks–McClellan Algorithm may be restated as the following steps:
- Make an initial guess of the L+2 extremal frequencies.
- Compute δ using the equation given.
- Using Lagrange Interpolation, we compute the dense set of samples of A(ω) over the passband and stopband.
- Determine the new L+2 largest extrema.
- If the alternation theorem is not satisfied, then we go back to (2) and iterate until the alternation theorem is satisfied.
- If the alternation theorem is satisfied, then we compute h(n) and we are done.
To gain a basic understanding of the Parks–McClellan Algorithm mentioned above, we can rewrite the algorithm above in a simpler form as:
- Guess the positions of the extrema are evenly spaced in the pass and stop band.
- Perform polynomial interpolation and re-estimate positions of the local extrema.
- Move extrema to new positions and iterate until the extrema stop shifting.
Q9) Draw and explain the First order Butterworth LPF?
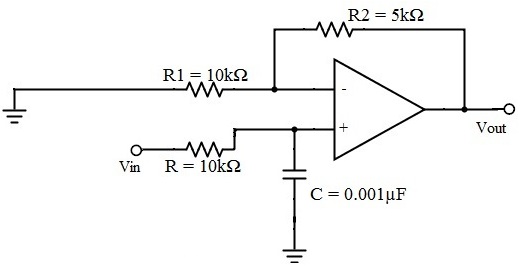
A9) The below circuit shows the low pass Butterworth filter:
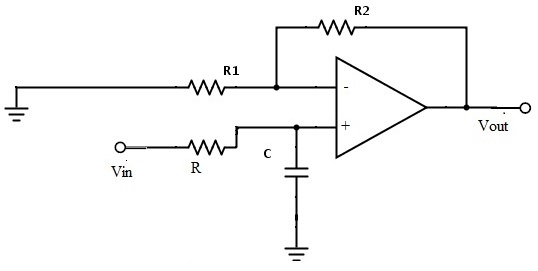
Fig 3 First order LP Butterworth Filter
The required pass band gain of the Butterworth filter will mainly depends on the resistor values of ‘R1’ and ‘Rf’ and the cut off frequency of the filter will depend on R and C elements in the above circuit.
The gain of the filter is given as Amax = 1 + (R1 / Rf)
The impedance of the capacitor ‘C’ is given by the -jXC and the voltage across the capacitor is given as,
Vc = - jXC / (R - jXC) * Vin
Where XC = 1 / (2πfc), capacitive Reactance.
The transfer function of the filter in polar form is given as
H(jω) = |Vout/Vin| ∟ø
Where gain of the filter Vout / Vin = Amax / √{1 + (f/fH)²}
And phase angle Ø = - tan-1 ( f/fH )
At lower frequencies means when the operating frequency is lower than the cut-off frequency, the pass band gain is equal to maximum gain.
Vout / Vin = Amax i.e. constant.
At higher frequencies means when the operating frequency is higher than the cut-off frequency, then the gain is less than the maximum gain.
Vout / Vin < Amax
When operating frequency is equal to the cut-off frequency the transfer function is equal to Amax /√2. The rate of decrease in the gain is 20dB/decade or 6dB/octave and can be represented in the response slope as -20dB/decade.
Q10) Take any example and design a Butterworth low pass filter?
A10) Let us consider the Butterworth low pass filter with cut-off frequency 15.9 kHz and with the pass band gain 1.5 and capacitor C = 0.001µF.
fc = 1/2πRC
15.9 * 10³ = 1 / {2πR1 * 0.001 * 10-6}
R = 10kΩ
Amax = 1.5 and assume R1 as 10 kΩ
Amax = 1 + {Rf / R1}
Rf = 5 kΩ