Module-5
Linear algebra
Rank of a matrix by echelon form-
The rank of a matrix (r) can be defined as –
1. It has at least one non-zero minor of order r.
2. Every minor of A of order higher than r is zero.
Example: Find the rank of a matrix M by echelon form.
M = 
Sol. First we will convert the matrix M into echelon form,
M = 
Apply,  , we get
, we get
M = 
Apply  , we get
, we get
M = 
Apply 
M = 
We can see that, in this echelon form of matrix, the number of non – zero rows is 3.
So that the rank of matrix X will be 3.
Example: Find the rank of a matrix A by echelon form.
A = 
Sol. Convert the matrix A into echelon form,
A = 
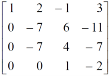
Apply 
A = 
Apply  , we get
, we get
A = 
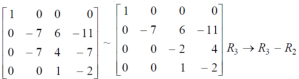
Apply  , we get
, we get
A = 
Apply  ,
,
A = 
Apply  ,
,
A = 
Therefore the rank of the matrix will be 2.
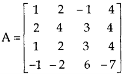
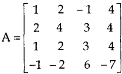
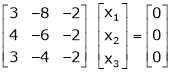
Example: Find the rank of a matrix A by echelon form.
A = 
Sol. Transform the matrix A into echelon form, then find the rank,
We have,
A = 
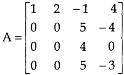
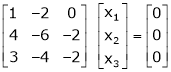
Apply, 
A = 
Apply  ,
,
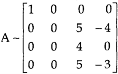
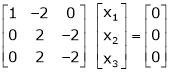
A = 
Apply 
A = 
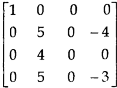
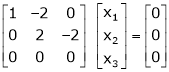
Apply 
A = 
Hence the rank of the matrix will be 2.
Example: Find the rank of the following matrices by echelon form?
Let A = 
Applying 
A 
Applying 
A 
Applying 
A 
Applying 
A 
It is clear that minor of order 3 vanishes but minor of order 2 exists as 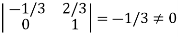
Hence rank of a given matrix A is 2 denoted by 
2. 
Let A = 
Applying 
Applying 
Applying 
The minor of order 3 vanishes but minor of order 2 non zero as 
Hence the rank of matrix A is 2 denoted by 
3. 
Let A = 
Apply 
Apply 
Apply 
It is clear that the minor of order 3 vanishes where as the minor of order 2 is non zero as 
Hence the rank of given matrix is 2 i.e. 
Rank of a matrix by normal form-
Any matrix ‘A’ which is non-zero can be reduced to a normal form of ‘A’ by using elementary transformations.
There are 4 types of normal forms –

The number r obtained is known as rank of matrix A.
Both row and column transformations may be used in order to find the rank of the matrix.
Note-Normal form is also known as canonical form
Example: reduce the matrix A to its normal form and find rank as well.
Sol. We have,
We will apply elementary row operation,



We get,
Now apply column transformation,



We get,
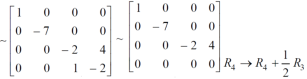
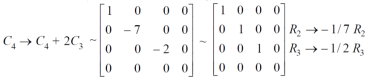
Apply
 , we get,
, we get,
Apply  and
and 
Apply 
Apply  and
and 
Apply  and
and 
As we can see this is required normal form of matrix A.
Therefore the rank of matrix A is 3.
Example: Find the rank of a matrix A by reducing into its normal form.
Sol. We are given,
Apply



Apply


This is the normal form of matrix A.
So that the rank of matrix A = 3
There are two types of linear equations-
1. Consistent
2. Inconsistent
Let’s understand about these two types of linear equations.
Consistent –
If a system of equations has one or more than one solution, it is said be consistent.
There could be unique solution or infinite solution.
For example-
A system of linear equations-
2x + 4y = 9
x + y = 5
Has unique solution,
Whereas,
A system of linear equations-
2x + y = 6
4x + 2y = 12
Has infinite solutions.
Inconsistent-
If a system of equations has no solution, then it is called inconsistent.
Consistency of a system of linear equations-
Suppose that a system of linear equations is given as-



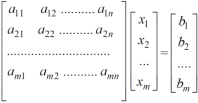
This is the format as AX = B
Its augmented matrix is-
[A:B] = C
(1) Consistent equations-
If Rank of A = Rank of C
Here, Rank of A = Rank of C = n ( no. Of unknown) – unique solution
And Rank of A = Rank of C = r , where r<n - infinite solutions
(2) Inconsistent equations-
If Rank of A ≠ Rank of C
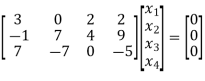
Solution of homogeneous system of linear equations-
A system of linear equations of the form AX = O is said to be homogeneous, where A denotes the coefficients and of matrix and O denotes the null vector.
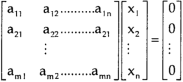
Suppose the system of homogeneous linear equations is,



It means ,
AX = O
Which can be written in the form of matrix as below,
Note- A system of homogeneous linear equations always has a solution if
1. r(A) = n then there will be trivial solution, where n is the number of unknown,
2. r(A) < n , then there will be an infinite number of solution.
Example: Find the solution of the following homogeneous system of linear equations,




Sol. The given system of linear equations can be written in the form of matrix as follows,
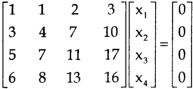
Apply the elementary row transformation,


 , we get,
, we get,
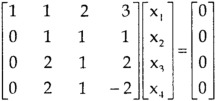

 , we get
, we get
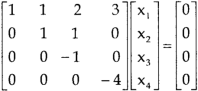
Here r(A) = 4, so that it has trivial solution,

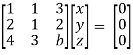
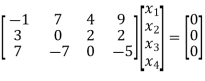
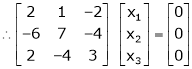
Example: Find out the value of ‘b’ in the system of homogenenous equations-
2x + y + 2z = 0
x + y + 3z = 0
4x + 3y + bz = 0
Which has
(1) Trivial solution
(2) Non-trivial solution
Sol. (1)
For trivial solution, we already know that the values of x , y and z will be zerp, so that ‘b’ can have any value.
Now for non-trivial solution-
(2)
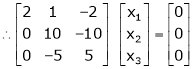
Convert the system of equations into matrix form-
AX = O
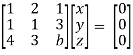
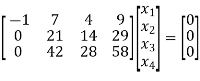
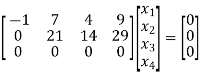
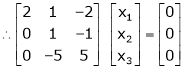
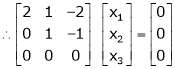
Apply  Respectively , we get the following resultant matrices
Respectively , we get the following resultant matrices
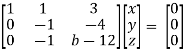
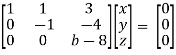
For non-trivial solutions, r(A) = 2 < n
b – 8 = 0
b = 8
Solution of non-homogeneous system of linear equations-
Example-1: check whether the following system of linear equations is consistent of not.
2x + 6y = -11
6x + 20y – 6z = -3
6y – 18z = -1
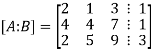
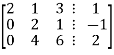
Sol. Write the above system of linear equations in augmented matrix form,
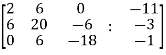
Apply  , we get
, we get
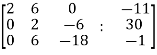
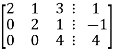
Apply 
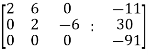
Here the rank of C is 3 and the rank of A is 2
Therefore both ranks are not equal. So that the given system of linear equations is not consistent.
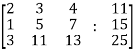
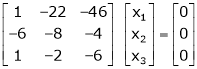
Example: Check the consistency and find the values of x , y and z of the following system of linear equations.
2x + 3y + 4z = 11
X + 5y + 7z = 15
3x + 11y + 13z = 25
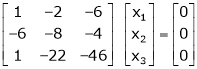
Sol. Re-write the system of equations in augmented matrix form.
C = [A,B]
That will be,
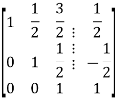
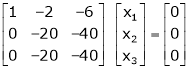
Apply 
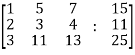
Now apply ,
We get,
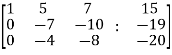 ~
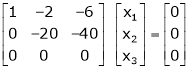
~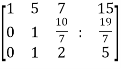 ~
~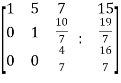
Here rank of A = 3
And rank of C = 3, so that the system of equations is consistent,
So that we can can solve the equations as below,
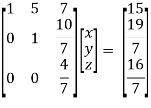
That gives,
x + 5y + 7z = 15 ……………..(1)
y + 10z/7 = 19/7 ………………(2)
4z/7 = 16/7 ………………….(3)
From eq. (3)
z = 4,
From 2,

From eq.(1), we get
x + 5(-3) + 7(4) = 15
That gives,
x = 2
Therefore the values of x , y , z are 2 , -3 , 4 respectively.
Key takeaways-
- If a system of equations has one or more than one solution, it is said be consistent.
- If a system of equations has no solution, then it is called inconsistent.
Matrix form of the linear system can be written as follows,
Ax = b
Where,
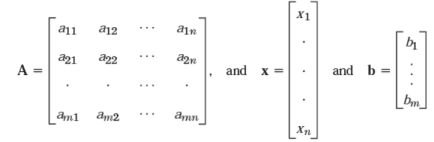
A is called augmented matrix.
Gauss elimination method can be presented as ,
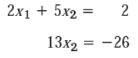
Suppose there is a linear system in triangular form ,
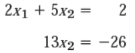
We can solve this as X2 = -26/13 = -2 and X1 = 6
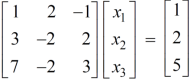
Lets another set of eq. Is given as ,
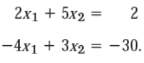
Its augmented matrix is given by,
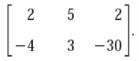
We eliminate X1 from the second eq.
To get the triangular system .we add twice the first equation to the second and we do same operation on rows of the augmented matrix. This gives,
-4X1 +4X1 +3X2 + 10X2 = -30 + 2.2
This is called Gauss elimination.
Example: find the solution of the following linear equations.
 +
+  -
-  = 1
= 1
 -
-  +
+  = 2
= 2
 - 2
- 2 +
+  = 5
= 5
Sol. These equations can be converted into the form of matrix as below-
Apply the operation,  and
and  , we get
, we get

We get the following set of equations from the above matrix,
 +
+  -
-  = 1 …………………..(1)
= 1 …………………..(1)
 + 5
+ 5 = -1 …………………(2)
= -1 …………………(2)
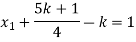
 = k
= k
Put x = k in eq. (1)
We get,
 + 5k = -1
+ 5k = -1

Put these values in eq. (1), we get

 and
and
These equations have infinitely many solutions.
Gauss-Jordan method-
According to this method we apply elementary row operation on both A and B and A becomes normal form then the solution is obtained.
Gauss-Jordan method is the modification of Gauss elimination method-
Example: Solve by the Gauss-Jordan elimination method-



Sol. Here
The augmented matrix is-





Therefore, the matrix A is in normal form-
Example: Find the general solution of the system of equation-



Sol. The system of the equations in the matrix form can be written as-
Apply- 
Apply- 
Apply- 


Let-

Now from (2),

Or
From equation (1),


Gauss-Seidel iteration method-
Step by step method to solve the system of linear equation by using Gauss Seidal Iteration method-
Suppose,



This system can be written as after dividing it by suitable constants,



Step-1 Here put y = 0 and z = 0 and x =  in first equation
in first equation
Then in second equation we put this value of x that we get the value of y.
In the third eq. We get z by using the values of x and y
Step-2: we repeat the same procedure
Example: solve the following system of linear equations by using Guass seidel method-
6x + y + z = 105
4x + 8y + 3z = 155
5x + 4y - 10z = 65
Sol. The above equations can be written as,
 ………………(1)
………………(1)
 ………………………(2)
………………………(2)
 ………………………..(3)
………………………..(3)
Now put z = y = 0 in first eq.
We get
x = 35/2
Put x = 35/2 and z = 0 in eq. (2)
We have,
Put the values of x and y in eq. 3
Again start from eq.(1)
By putting the values of y and z
y = 85/8 and z = 13/2
We get

The process can be showed in the table format as below
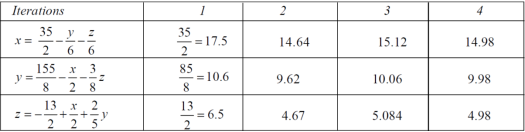
At the fourth iteration , we get the values of x = 14.98 , y = 9.98 , z = 4.98
Which are approximately equal to the actual values,
As x = 15 , y = 10 and y = 5 ( which are the actual values)
Example: Solve the following system of linear equations by using Guass-seidel method-
5x + 2y + z = 12
x + 4y + 2z = 15
x + 2y + 5z = 20
Sol. These equations can be written as,
 ………………(1)
………………(1)
 ………………………(2)
………………………(2)
 ………………………..(3)
………………………..(3)
Put y and z equals to 0 in eq. 1
We get,
x = 2.4
Put x = 2.4, and z = 0 in eq. 2 , we get
Put x = 2.4 and y = 3.15 in eq.(3) , we get
Again start from eq.(1), put the values of y and z , we get
 = 0.688
= 0.688
We repeat the process again and again ,
The following table can be obtained –
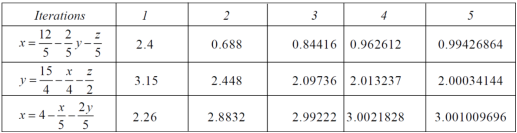

Here we see that the values are approx. Equal to exact values.
Exact values are, x = 1, y = 2, z = 3.
First we will go through some important definitions before studying Eigen values and Eigen vectors.
1. Vector-
An ordered n – touple of numbers is called an n – vector. Thus the ‘n’ numbers x1, x2, …………xn taken in order denote the vector x. i.e. x = (x1, x2, ……., xn).
Where the numbers x1, x2, ………..,xn are called component or co – ordinates of a vector x. A vector may be written as row vector or a column vector.
If A be an mxn matrix then each row will be an n – vector & each column will be an m – vector.
2. Linear dependence-
A set of n – vectors. x1, x2, …….., xr is said to be linearly dependent if there exist scalars. k1, k2, …….,kr not all zero such that
k1 + x2k2 + …………….. + xrkr = 0 … (1)
3. Linear independence-
A set of r vectors x1, x2, ………….,xr is said to be linearly independent if there exist scalars k1, k2, …………, kr all zero such that
x1 k1 + x2 k2 + …….. + xrkr = 0
Important notes-
- Equation (1) is known as a vector equation.
- If the vector equation has non – zero solution i.e. k1, k2, ….,kr not all zero. Then the vector x1, x2, ……….xr are said to be linearly dependent.
- If the vector equation has only trivial solution i.e.
k1 = k2 = …….=kr = 0. Then the vector x1, x2, ……,xr are said to linearly independent.
4. Linear combination-
A vector x can be written in the form.
x = x1 k1 + x2 k2 + ……….+xrkr
Where k1, k2, ………….., kr are scalars, then X is called linear combination of x1, x2, ……, xr.
Results:
- A set of two or more vectors are said to be linearly dependent if at least one vector can be written as a linear combination of the other vectors.
- A set of two or more vector are said to be linearly independent then no vector can be expressed as linear combination of the other vectors.
Example 1
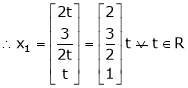
Are the vectors  ,
,  ,
,  linearly dependent. If so, express x1 as a linear combination of the others.
linearly dependent. If so, express x1 as a linear combination of the others.
Solution:
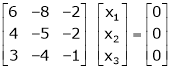
Consider a vector equation,

i.e. 




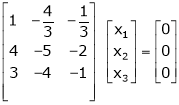
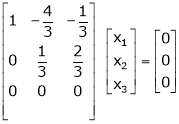
Which can be written in matrix form as,



Here  & no. Of unknown 3. Hence the system has infinite solutions. Now rewrite the questions as,
& no. Of unknown 3. Hence the system has infinite solutions. Now rewrite the questions as,


Put 
 and
and


Thus 
i.e. 
i.e. 


Since F11k2, k3 not all zero. Hence  are linearly dependent.
are linearly dependent.
Example 2
Examine whether the following vectors are linearly independent or not.
 and
and  .
.
Solution:
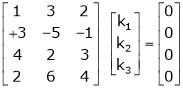
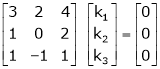
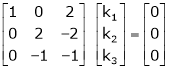
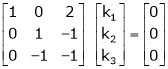
Consider the vector equation,

i.e.  … (1)
… (1)


Which can be written in matrix form as,
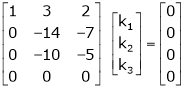
R12
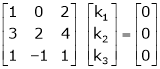
R2 – 3R1, R3 – R1

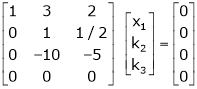
R3 + R2
Here Rank of coefficient matrix is equal to the no. Of unknowns. i.e. r = n = 3.
Hence the system has unique trivial solution.
i.e. 
i.e. vector equation (1) has only trivial solution. Hence the given vectors x1, x2, x3 are linearly independent.
Example 3
At what value of P the following vectors are linearly independent.

Solution:
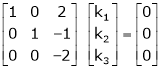
Consider the vector equation.

i.e.



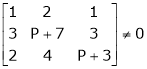
This is a homogeneous system of three equations in 3 unknowns and has a unique trivial solution.
If and only if Determinant of coefficient matrix is non zero.
 consider
consider  .
.
 .
.
i.e.





Thus for  the system has only trivial solution and Hence the vectors are linearly independent.
the system has only trivial solution and Hence the vectors are linearly independent.
Note:-
If the rank of the coefficient matrix is r, it contains r linearly independent variables & the remaining vectors (if any) can be expressed as linear combination of these vectors.
Characteristic equation:-
Let A he a square matrix,  be any scalar then
be any scalar then  is called characteristic equation of a matrix A.
is called characteristic equation of a matrix A.
Note:
Let a be a square matrix and ‘ ’ be any scalar then,
’ be any scalar then,
1)  is called characteristic matrix
is called characteristic matrix
2)  is called characteristic polynomial.
is called characteristic polynomial.
The roots of a characteristic equations are known as characteristic root or latent roots, Eigen values or proper values of a matrix A.
Eigen vector:-
Suppose  be an Eigen value of a matrix A. Then
be an Eigen value of a matrix A. Then  a non – zero vector x1 such that.
a non – zero vector x1 such that.
 … (1)
… (1)
Such a vector ‘x1’ is called as Eigen vector corresponding to the Eigen value  .
.
Properties of Eigen values:-
- Then sum of the Eigen values of a matrix A is equal to sum of the diagonal elements of a matrix A.
- The product of all Eigen values of a matrix A is equal to the value of the determinant.
- If
 are n Eigen values of square matrix A then
are n Eigen values of square matrix A then  are m Eigen values of a matrix A-1.
are m Eigen values of a matrix A-1. - The Eigen values of a symmetric matrix are all real.
- If all Eigen values are non –zero then A-1 exist and conversely.
- The Eigen values of A and A’ are same.
Properties of Eigen vector:-
- Eigen vector corresponding to distinct Eigen values are linearly independent.
- If two are more Eigen values are identical then the corresponding Eigen vectors may or may not be linearly independent.
- The Eigen vectors corresponding to distinct Eigen values of a real symmetric matrix are orthogonal.
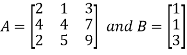
Example1: Find the sum and the product of the Eigen values of  ?
?
Sol. The sum of Eigen values = the sum of the diagonal elements
 =1+(-1)=0
=1+(-1)=0
The product of the Eigen values is the determinant of the matrix

On solving above equations we get 
Example2:Find out the Eigen values and Eigen vectors of  ?
?
Sol. The Characteristics equation is given by 





Or 
Hence the Eigen values are 0,0 and 3.
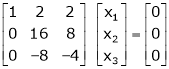
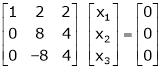
The Eigen vector corresponding to Eigen value  is
is

Where X is the column matrix of order 3 i.e.
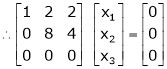
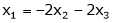
This implies that 
Here number of unknowns are 3 and number of equation is 1.
Hence we have (3-1) = 2 linearly independent solutions.
Let 
Thus the Eigen vectors corresponding to the Eigen value  are (-1,1,0) and (-2,1,1).
are (-1,1,0) and (-2,1,1).
The Eigen vector corresponding to Eigen value  is
is

Where X is the column matrix of order 3 i.e.

This implies that 
Taking last two equations we get
Or 
Thus the Eigen vectors corresponding to the Eigen value  are (3,3,3).
are (3,3,3).
Hence the three Eigen vectors obtained are (-1,1,0), (-2,1,1) and (3,3,3).
Example3: Find out the Eigen values and Eigen vectors of 
Sol. Let A =
The characteristics equation of A is  .
.
Or 
Or 
Or 
Or 
The Eigen vector corresponding to Eigen value  is
is

Where X is the column matrix of order 3 i.e.
Or 


On solving we get 
Thus the Eigen vectors corresponding to the Eigen value  is (1,1,1).
is (1,1,1).
The Eigen vector corresponding to Eigen value  is
is

Where X is the column matrix of order 3 i.e.
Or 


On solving  or
or  .
.
Thus the Eigen vectors corresponding to the Eigen value  is (0,0,2).
is (0,0,2).
The Eigen vector corresponding to Eigen value  is
is

Where X is the column matrix of order 3 i.e.
Or 


On solving we get  or
or  .
.
Thus the Eigen vectors corresponding to the Eigen value  is (2,2,2).
is (2,2,2).
Hence three Eigen vectors are (1,1,1), (0,0,2) and (2,2,2).
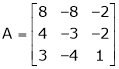
Example-4:
Determine the Eigen values of Eigen vector of the matrix.
Solution:
Consider the characteristic equation as, 
i.e. 
i.e. 



i.e. 
Which is the required characteristic equation.

 are the required Eigen values.
are the required Eigen values.
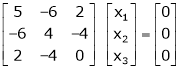
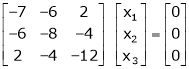
Now consider the equation
 … (1)
… (1)
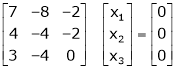
Case I:
If  Equation (1) becomes
Equation (1) becomes
R1 + R2



Thus 
 independent variable.
independent variable.
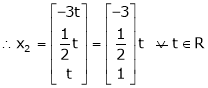
Now rewrite equation as,


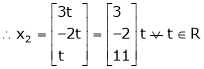
Put x3 = t
 &
&


Thus  .
.
Is the eigen vector corresponding to  .
.
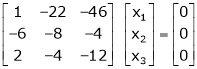
Case II:
If  equation (1) becomes,
equation (1) becomes,




Here 
 Independent variables
Independent variables
Now rewrite the equations as,


Put 
 &
&

 .
.
Is the eigen vector corresponding to  .
.
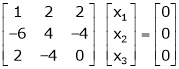
Case III:
If  equation (1) becomes,
equation (1) becomes,





Here rank of 
 independent variable.
independent variable.
Now rewrite the equations as,


Put 

Thus 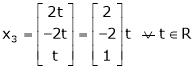 .
.
Is the eigen vector for  .
.
Example-5:
Find the Eigen values of Eigen vector for the matrix.
Solution:
Consider the characteristic equation as 
i.e. 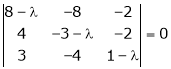



i.e. 


 are the required eigen values.
are the required eigen values.
Now consider the equation
 … (1)
… (1)
Case I:
 Equation (1) becomes,
Equation (1) becomes,



Thus  and n = 3
and n = 3
 3 – 2 = 1 independent variables.
3 – 2 = 1 independent variables.
Now rewrite the equations as,

Put 
 ,
, 
I.e.
The Eigen vector for 
Case II:
If  equation (1) becomes,
equation (1) becomes,


Thus 

Independent variables.
Now rewrite the equations as,
Put 




Is the Eigen vector for
Now
Case III:-
If  equation (1) gives,
equation (1) gives,
R1 – R2


Thus 

Independent variables
Now 

Put 
Thus
Is the Eigen vector for
Rayleigh's power method-
Suppose x be an eigen vector of A. Then the eigen value  corresponding to this eigen vector is given as-
corresponding to this eigen vector is given as-

This quotient is called Rayleigh’s quotient.
Proof:
Here x is an eigen vector of A,
As we know that  ,
,
We can write-
Two square matrix  and A of same order n are said to be similar if and only if
and A of same order n are said to be similar if and only if
 for some non singular matrix P.
for some non singular matrix P.
Such transformation of the matrix A into  with the help of non singular matrix P is known as similarity transformation.
with the help of non singular matrix P is known as similarity transformation.
Similar matrices have the same Eigen values.
If X is an Eigen vector of matrix A then  is Eigen vector of the matrix
is Eigen vector of the matrix 
Reduction to Diagonal Form:
Let A be a square matrix of order n has n linearly independent Eigen vectors Which form the matrix P such that

Where P is called the modal matrix and D is known as spectral matrix.
Procedure: let A be a square matrix of order 3.
Let three Eigen vectors of A are  Corresponding to Eigen values
Corresponding to Eigen values 
Let 
 {by characteristics equation of A}
{by characteristics equation of A}
Or 
Or 
Note: The method of diagonalization is helpful in calculating power of a matrix.
 .Then for an integer n we have
.Then for an integer n we have 
We are using the example of 1.6*
Example1: Diagonalise the matrix 
Let A= 
The three Eigen vectors obtained are (-1,1,0), (-1,0,1) and (3,3,3) corresponding to Eigen values  .
.
Then  and
and 
Also we know that 

Example2: Diagonalise the matrix
Let A =
The Eigen vectors are (4,1),(1,-1) corresponding to Eigen values  .
.
Then  and also
and also 
Also we know that 

Key takeaways-
- Let A be a square matrix of order n has n linearly independent Eigen vectorsWhich form the matrix P such that

Where P is called the modal matrix and D is known as spectral matrix.
References:
- C.Ray Wylie, Louis C.Barrett : "Advanced Engineering Mathematics", 6th Edition, 2. McGraw-Hill Book Co., New York, 1995.
- James Stewart : “Calculus -Early Transcendentals”, Cengage Learning India Private Ltd., 2017.
- B.V.Ramana: "Higher Engineering Mathematics" 11th Edition, Tata McGraw-Hill, 2010.
- Srimanta Pal & Subobh C Bhunia: “Engineering Mathematics”, Oxford University Press, 3rd Reprint, 2016.
- Gupta C.B., Singh S.R. And Mukesh Kumar: “Engineering Mathematics for Semester I & II”, Mc-Graw Hill Education (India) Pvt.Ltd., 2015.




