UNIT 6
Kinetics of a Particle
a) Introduction to basic concepts:
Equation of Motion
Particle of mass msubjected to the action of concurrent forces F1, F2,… whose vector sum is ΣF:
Equation of motion: ΣF= ma
Force-Mass-Acceleration equation
Equation of Motion gives the instantaneous value of the acceleration corresponding to the instantaneous value of the forces.
•The equation of motion can be used in scalar component form in any coordinate system.
•For a 3 DOFproblem, all three scalar components of equation of motion will be required to be integrated to obtain the space coordinates as a function of time.
•All forces, both applied or reactive, which act on the particle must be accounted for while using the equation of motion.
Free Body Diagrams:
In Statics: Resultant of all forces acting on the body = 0
In Dynamics: Resultant of all forces acting on the body = ma(Motion of body)
Rectilinear Motion
Motion of a particle along a straight line
For motion along x-direction, accelerations along y-and z-direction will be zero
ΣFx= max
ΣFy= 0
ΣFz= 0
For a general case:
ΣFx= max
ΣFy= may
ΣFz= maz
The acceleration and resultant force are given by:
Example
A 75 kg man stands on a spring scale in an elevator. During the first 3 seconds of motion from rest, the tension Tin the hoisting cable is 8300 N. Find the reading Rof the scale in Newton during this interval and the upward velocity v of the elevator at the end of the 3 seconds. Total mass of elevator, man, and scale is 750 kg.
Solution:
Draw the FBD of the elevator and the man alone
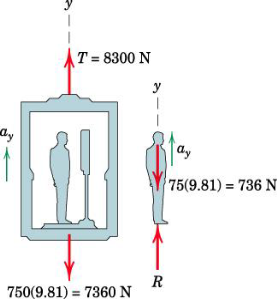
During first 3 seconds, the forces acting on the elevator are constant. Therefore, the acceleration ay will also remain constant during this time.
Force registered by the scale and the velocity of the elevator depend on the acceleration ay From FBDof the elevator, scale, and man taken together:
ΣFy= may=8300-7360 =940 (m=750)
750ay= 940
ay= 940/750 = 1.257 m/s2
From FBDof the man alone:
ΣFy= may= R-736 = 75ay
R= 830 N
Velocity reached at the end of the 3 sec:

v= 3.77 m/s
b) D‘Alemberts Principle
The principle of virtual work states that the sum of the incremental virtual works done by all external forces Fi acting in conjunction with virtual displacements _siof the point on which the associated force is acting is zero:
This technique is useful for solving statics problems, with static forces of constraint. A static force of constraint is one that does no work on the system of interest, but merely holds a certain part of the system in place. In a statics problem there are no accelerations. We can extend the principle of virtual work to dynamics problems, i.e., ones in which real motions and accelerations occur, by introducing the concept of inertial forces. For each parcel of matter in the system with mass m, Newton’s second law states that
F=ma: (1.1.2)
We can make this dynamics problem look like a statics problem by defining an inertial force
F* = - ma (1.1.3)
And rewriting equation (1.1.2) as
F total = F + F* = 0(1.1.4)
D’Alembert’s principle is just the principle of virtual work with the inertial forces added to the list of forces that do work:
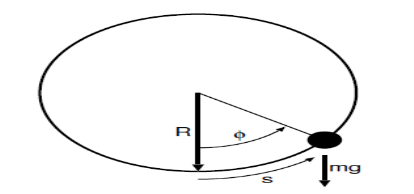
Figure 1.1.1: Sketch of bead of mass m sliding frictionlessly on a vertical hoop of radius R under the influence of gravity.
Mass falling under gravity
A trivial example would be a mass m falling under the effect of a constant gravitational field g. With z positive upward, the force on the mass is -mg and the work due to this force under vertical displacement 
The inertial force is  and the work is
and the work is 
Setting the sum of the two to zero gives us

From which we infer the expected result

D’Alembert’s principle offers no advantages over normal procedures in this case. However, it becomes more economical in problems with constraints.
Bead on frictionless vertical hoop
Figure 1.1.1 illustrates the slightly more interesting problem of a bead sliding frictionlessly around a vertically oriented hoop of wire. Here the force of gravity is not in the direction of motion. The component of gravity normal to the hoop does no work on the bead. Nor does the force of the hoop on the bead that constrains the bead to move in a circle. The work on the bead due to gravity for a small displacement  along the wire
along the wire 
The acceleration of the bead also has two components, a radial component
 Where the tangential velocity is
Where the tangential velocity is  and a tangential component
and a tangential component 
The radial component of the inertial force mv2=R does no work. However, the tangential component 
Does:
D’Alembert’s principle thus gives us

From which we get the governing equation

(This could equally well have been expressed in terms of s rather than _.)
c) Concept of Inertia force:
Inertia is a property of matter. According to Newton's Law of Inertia, an object at rest tends to stay at rest unless acted upon by a force. Likewise, an object in motion tends to remain at that velocity unless acted upon by some force.The concept of an inertial force comes from Newton's Laws of Motion, which can be stated as:
I. Every object in a state of uniform motion—including being stationary—tends to remain in that state of motion unless an external force is applied to it (Law of Inertia).
II. The relationship between an object's mass m, its acceleration a, and the applied or external force F is: F = ma.
III. If a force is applied to an object, there is an apparent equal and opposite reaction or resistance (Action-Reaction Law).
That equal and opposite reaction is called the inertial force. It is a factious or pseudo force equal to −F = ma.
What that means is that there is no such thing as a unidirectional force or a force that acts on only one object. There must always be two objects involved, acting on each other. One object acts on the other, while the second resists the action of the first.Inertia is a property of space and matter such that an object has a tendency to remain in its state of motion unless acted upon by a force. This is stated in Newton's First Law of Motion which is often called the Law of Inertia.
This law states that if an object is motionless, it will stay motionless unless acted upon by some force. Likewise, if an object is moving at a constant velocity, it will continue at that speed unless acted upon by some force along the line of motion. And finally, if an object is moving, it will move in a straight line unless acted upon by some force at an angle.
This law is important in defining how things around us behave.
Object stays motionless
The Law of Inertia states that objects that are not moving will remain motionless, unless you apply a force on them. This law of nature makes sure things will stay where you put them. It requires that you provide a push or pull to get something moving.
A trick using inertia
There is the parlor trick that you may have seen where a person quickly pulls a tablecloth from under a setting of heavy dishes or some other objects. If it is does correctly, the objects remain in place on the table after the tablecloth is pulled from under them. This trick works because the inertia of the heavy objects tends to keep them in place. By quickly pulling the tablecloth, the force of friction is easily overcome. If the tablecloth was pulled slowly, the friction would be greater than the inertia, and the dishes would follow along.
Object will continue motion
Once you start an object moving, it will keep moving unless you apply a force in the opposite direction to slow it down. Typically, the force of friction will slow things down. But in outer space, where friction is almost zero, an object will move at its given velocity forever unless acted upon by some external force.If you push a moving object in the direction of motion, it will accelerate to a new velocity. Once you stop pushing, the object will continue at the velocity it had once you stopped pushing.
Things move in straight lines
The Law of Inertia states that moving objects go in a straight line. You must apply a force on an object to make it go in a circular motion. For example, when you spin an object around on a string, you are applying a force on that object from the string to make it go around. Once you let the string (or the force) go, the object will fly off in a straight line.
Likewise, the Moon is attracted to the Earth by the gravitational force. That force is just enough to make the Moon spin around the Earth. If gravitation would stop, the Moon would fly off in a straight line into outer space.
When an external force is applied on an object, it will resist a change in velocity or acceleration. This resistance is called an inertial force. Since it is not an applied or external force, it is also called a fictitious force.
The concept is based on Newton's Laws of Motion, including the Law of Inertia and the Action-Reaction Law.
Inertial force can be examined both when you apply a force on an object and when a force is applied on you.
When you apply force
When you apply a force on a freely moving object in order to accelerate, decelerate, or change its direction, an equal inertial force acts on the object in an opposite direction of your applied force.
You can experience or feel that inertial force. If there were no inertial force, the object would just move when you pushed on it.
For example, when you push on an object, you can feel its resistance to the change in speed or direction.
Likewise, if you swing a ball around on a rope, you will feel the centrifugal force pulling the ball outward. That centrifugal force is an inertial force, where the ball seeks to follow a straight line.
When force applied on you
When an applied force acts on you, you can feel the inertial force opposing the applied force. However, it is not as obvious as when a force is applied on you.
Examples include:
When you are given a shove, you feel your resistance to being moved.
When the applied force of gravity pulls you toward the ground, you can feel the opposing inertial force from your weight on the ground.
Likewise, when you are riding on a fast moving merry-go-round, you can feel the outward pull of the inertial centrifugal force on you.
Note that some sources call these forces fictitious, virtual, or pseudo forces, because there is no apparent force pushing on you. However, inertial forces do not need physical contact to oppose applied forces.
d) Equations of dynamic equilibrium:
There are two rough categories: static equilibrium and dynamic. An example of a static equilibrium, imagine a child’s swing, just hanging there. If a child or just the wind pushes the swing out of position it comes back and ends up just hanging there. This is a property of equilibrium systems: they defend their state.
An example of a dynamic equilibrium is a soda bottle. There is liquid and gas inside. Most of the gas is dissolved in the liquid. If you crack the cap and let some of the gas out and screw the cap back on, you will see bubbles form, rise to the top of the liquid and break. The bottle, which became somewhat soft when depressurized, becomes firm again and the bottle will hiss again if the lid is cracked open again. This is a dynamic equilibrium because studies show that gas molecules leave the liquid and enter the gas above it continuously that never stops. At the same time gases molecules enter the liquid continuously, that never stops. When the two opposing processes occur at the same rate, no net change occurs in the bottle (no more bubbles form, the bottle neither softens nor hardens, etc.).
Dynamic equilibrium occurs because of process that opposes one another occurring at the same rate. Static equilibrium occurs without such processes.
e) Newton‘s second law of motion. (Analysis limited to simple systems only.)
Motion of the body by considering the force causing motion.
OR
Motion of the bodies under the action of unbalanced force acting on it.
Newton’s law :-
Everybody continues in state of rest or state of uniform motion unless it is acted by some external force.
Newton’s second law :-
The rate of change of momentum is directly proportional to the impressed force and takes place in direction of force.
- F = m.a
Newton’s third law :-
To every action there is equal and opposite reaction.
Application of Newton’s second law :-
1) For rectangular coordinate system :-
When unbalanced force is acting on particle having acceleration “ a ”
Then by newton’s second law we can write

∑ 
∑
∑
 = are the forces acting along I , j , k.
= are the forces acting along I , j , k.
 Direction along
Direction along  .
.
 Components of acceleration “a” acting in
Components of acceleration “a” acting in 
Direction or acting in  direction.
direction.
2) Application of second law for curvilinear motion of particle ( using tangential and normal component ) :-
Then,
According to newton’s second law
∑

3) Application of second law for radial and transverse coordinates :-
When particle move along curve and number of forces are acting on it.
Then,
According to second law

The force of equal magnitude but acting in the opposite direction of motion us called inertia of force.
Inertia force can keep the particle in equilibrium.
a) Work Energy principle for a particle in motion.
The principle of work and energy states that, sum of the work done by all the forces acting on the particle is equal to the change in total energy (kinetic energy) of the particle.
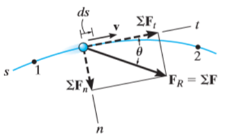
Consider the particle located on the path that is defined relative to an inertial coordinate system as shown in figure below.
Let the particle has initial position  with speed
with speed  and final position
and final position  with speed
with speed 
Let the particle has a mass m and is subjected to a system of external forces which is represented by the resultant force given below

The equation of motion for the particle in the tangential direction is given by

Applying the kinematic equation  and integrating both sides
and integrating both sides
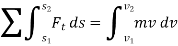
Where  and
and  are the initial and final kinetic energies of the particle. Kinetic energy is always positive.
are the initial and final kinetic energies of the particle. Kinetic energy is always positive.
b) Application of Work – Energy principle to a system consists of connected masses and springs.
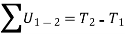
When a particle subjected to force F undergoes a displacement in the direction of the force, the force F will do work on the particle.
Consider a particle subjected to force F that causes the displacement of ds at an angle of  from the direction of force.
from the direction of force.
Let,
r = position vector of initial position
r’ = position vector of new position
Dr = r’ – r = displacement whose magnitude is ds
The component of forces in the direction of motion that causes the particle to displacement is given as 
As we know,
Work = Force x displacement

Where,  is the work done to displace the particle by ds
is the work done to displace the particle by ds
The work is a scalar quantity given by the dot product.

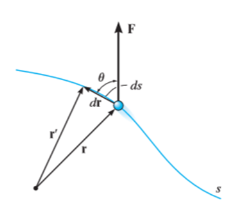
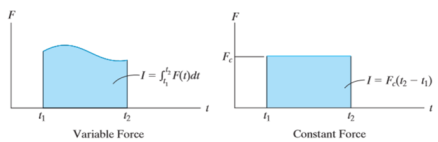
There are various types of work for different forces given below:
- Work of variable force
If a particle is subjected to variable force F that undergoes a displacement along its path with magnitude from  and
and  defined by the position vectors
defined by the position vectors  and
and  respectively and
respectively and  is the angle between the direction of force and the direction of displacement, as shown in figure, then the work done by the force F is given by
is the angle between the direction of force and the direction of displacement, as shown in figure, then the work done by the force F is given by

Where, F and  are defined as the function of position.
are defined as the function of position.
Then the area under this graph bounded by  and
and  represents the total work. (Fig. b)
represents the total work. (Fig. b)
2. Work of constant force
If a particle is subjected to constant force FC that undergoes a displacement along its path with magnitude from  and
and  defined by the position vectors
defined by the position vectors  and
and  respectively and
respectively and  is the constant angle between the direction of force and the direction of displacement, as shown in figure, then the work done by the force FC is given by
is the constant angle between the direction of force and the direction of displacement, as shown in figure, then the work done by the force FC is given by
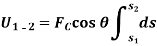

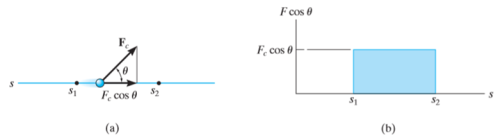
Then the area under this graph bounded by  and
and  (rectangle) represents the total work. (Fig b)
(rectangle) represents the total work. (Fig b)
3. Work of weight
Consider a particle of weight W that moves along the path s from the position  to
to  defined by the position vector
defined by the position vector  and
and  respectively.
respectively.
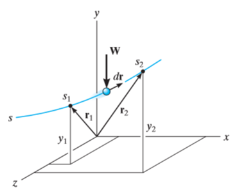
The displacement of a particle at any point intermediate on the path is given by

Since,

We have,

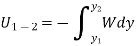
As weight is a constant force, hence,

4. Work of spring force
Consider an elastic spring that is elongated by distance ds on the action of force FS as shown below.
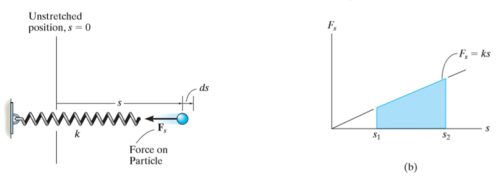
If a particle displaces from position  to
to  , then the work done is given by,
, then the work done is given by,


The trapezoidal region in the graph represents the total work done.
a) Principle of linear impulse and momentum.
Using kinematics, the equation of motion for a particle of m is given by,
Integrating above equation between limits  at
at  to
to  at
at 
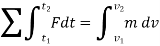
The term  is referred as the linear impulse, while the term
is referred as the linear impulse, while the term  is change in linear momentum.
is change in linear momentum.

Since m is a positive scalar, the linear-momentum vector has the same direction as v.
Linear impulse is a vector quantity that measures the effect of a force during the time the force acts. As time is a positive scalar quantity, the impulse acts in the same direction as the force.
If the force is variable, the resulting impulse is given by

If the force is constant in magnitude and also in direction, the resulting impulse is given by


Graphically, magnitude of linear impulse is given by the area under the curve plotted on the force versus time plot.
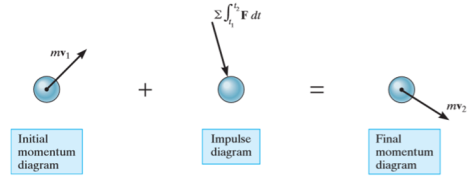
Principle of impulse momentum states that sum of all the impulses applied to the particle in a time period of motion of a particle is equal to the change in momentum of the particle.
Mathematically,
Initial momentum + sum of impulses = Final momentum
b) Impact and collision: Law of conservation of momentum, Coefficient of Restitution.
Impact occurs when two bodies collide with each other in a very short period of time, resulting relatively huge (impulsive) forces to be exerted between the bodies.
Example: striking of a hammer on a nail, a golf club on a ball
There are two types on impact:
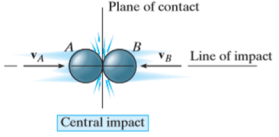
- Central Impact
Central impact occurs when the direction of motion of the mass centers of the two colliding particles is along a line passing through the mass centers of the particles. This line is called the line of impact which is perpendicular to plane of contact.
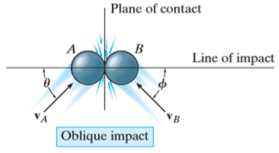
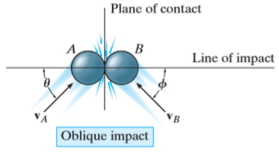
2. Oblique impact
When the motion of one or both of the particles make an angle with the line of impact, then the impact is said to be oblique impact.
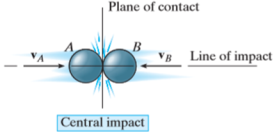
Consider two particles A and B involving the central impact of the shown in Fig. a
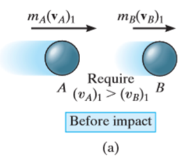
Let velocity of particle A is more than particle B.
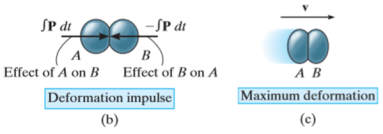
During the collision the particles must be considered as deformable or nonrigid particles. The particles will undergo a period of deformation such that they exert an equal but opposite deformation impulse  on each other.
on each other.
When the deformation becomes maximum, the relative motion of particle will become zero. Hence, the particle will move with same velocity v.
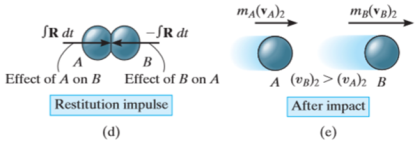
Then the particles will either return to their original shape or remain permanently deformed. This occurs after the period of restitution.
The equal but opposite restitution impulse  pushes the particles apart from each another, shown in fig d. In reality, the physical properties of any two bodies are such that the deformation impulse will always be greater than that of restitution.
pushes the particles apart from each another, shown in fig d. In reality, the physical properties of any two bodies are such that the deformation impulse will always be greater than that of restitution.

After the separation, the particles will have the final momenta as shown in Fig e.
Momentum for the system of particles is conserved as during the collision the internal impulses of deformation and restitution cancel each other.
Hence,

Applying impulse momentum equation for particle A during deformation phase (fig a, b and c), we get


Now, applying impulse momentum equation for particle A during restitution phase (fig c, d and e), we get


The ratio of the restitution impulse to the deformation impulse is called the coefficient of restitution.
Similarly, Coefficient of restitution can be established for particle B.
If velocity  is unknown, then it can be eliminated from above equations and coefficient of restitution can be expressed in terms of the particle’s initial and final velocities
is unknown, then it can be eliminated from above equations and coefficient of restitution can be expressed in terms of the particle’s initial and final velocities
When, e = 1, the collision between the two particles is perfectly elastic. In perfectly elastic collision, the deformation impulse is equal and opposite to the restitution impulse. This is the ideal case and is impossible to achieve this case.
When e = 0, the collision between the two particles is perfectly plastic. In this case there is no restitution impulse so that after collision both particles couple or stick together and move with a common velocity.
Coefficient of Restitution (e)
It is the ratio of impulses during the restoration period and deformation period .it is denote by e.
This is always positive and lies between o e
e  1.
1.
e = 
When the impact takes place , the two object initially goes under the deformation for small duration & then , they tries to region their original shape , size
1] Perfectly elastic impact:-
In this impact, both bodies regain their shapes & size completely
I.e. there is complete restoration .here ,
a] momentum is conserved along the line of impact

b] K.E. Is also conserved .no loss of K.E. During impact

c] Coefficient of restitution (e) = 1
e= 1=  )
)


d] Both bodies separates after input .
2] Perfectly plastic impact:-
In this impact, both bodies are couple together after the impact and they move together with same velocity, here permanent deformation take place . So there is no restitution.
a] Here , momentum is conserved :-

Where
V = common velocity of both bodies after
Impact.
b] K.E.is not conserved:-
There is loss of k.e. During impact.
Loss of K.E. = total k.e. Before impact – total k. e. After impact
Loss of K.E. =  -
- 
c] Both bodied move together after impact.
d] Coefficient of restitution ( e ) = 0 .
3] Partially elastic (semi elastic) impact .
In this impact, both bodies do not regain their original shape & size completely . But there is a partial restoration.
a] here momentum is conserved.

b] K.E. Is not conserved .there is some loss in K.E
Initial K.E. > KE after impact .
 >
>
c] Coefficient of restitution is more than zero & less than 1
0 < e < 1.
4] impact with very large mass ( infinite mass)
When a body of small collied with a body of very large mass as compared to first body, then the impact is considered as impact with infinite mass.
Ex .a ball is dropped on the floor .
a] in this type of impact , low of conservation of momentum can not be applied .
b] there is no loss I KE due to impact
c] coefficient of restitution is
e = 
But velocity if floor brfore&after impact is zero.


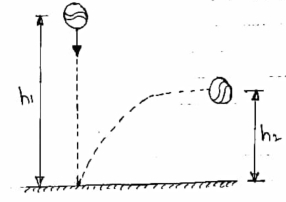
Velocity of ball just before the impact when it is dropped frm height h1 is ,

After the impact ball rises to the height h2 , then its velocity after the impact is 
e  =
= =
= 
Where ,

Conservation of Momentum
i) Conservation of Linear Momentum
If the sum of all the linear impulses acting on a system of connected rigid bodies is zero in a specific direction, then the linear momentum of the system is constant. Hence, conservation of linear momentum states that in such cases, initial linear momentum of a rigid body is equal to the final linear momentum of a rigid body.

Or,
This equation is termed as the conservation of linear momentum.
Ii) Conservation of Angular Momentum
The angular momentum of a system of connected rigid bodies is conserved about the system’s center of mass G, or a fixed point O, when the sum of all the angular impulses about these points is zero or appreciably small.

Or,
This equation is termed as the conservation of linear momentum.
c) Direct Central Impact and Oblique Central Impact:
Impact occurs when two bodies collide with each other in a very short period of time, resulting relatively huge (impulsive) forces to be exerted between the bodies.
Example: striking of a hammer on a nail, a golf club on a ball
There are two types on impact:
1) Central Impact
Central impact occurs when the direction of motion of the mass centers of the two colliding particles is along a line passing through the mass centers of the particles. This line is called the line of impact which is perpendicular to plane of contact.
2) Oblique impact
When the motion of one or both of the particles make an angle with the line of impact, then the impact is said to be oblique impact.
d) Loss of Kinetic Energy in collision of inelastic bodies:
An inelastic collision is a collision in which there is a loss of kinetic energy. While momentum of the system is conserved in an inelastic collision, kinetic energy is not. This is because some kinetic energy had been transferred to something else. Thermal energy, sound energy, and material deformation are likely culprits.
Suppose two similar trolleys are traveling towards each other. They collide, but because the trolleys are equipped with magnetic couplers they join together in the collision and become one connected mass. This type of collision is perfectly inelastic because the maximum possible kinetic energy has been lost. This doesn't mean that the final kinetic energy is necessarily zero; momentum must still be conserved.
In the real world most collisions are somewhere in between perfectly elastic and perfectly inelastic. A ball dropped from a height hhh above a surface typically bounces back to some height less than hhh, depending on how rigid the ball is. Such collisions are simply called inelastic collisions.
Examples of perfectly inelastic collisions
The ballistic pendulum is a practical device in which an inelastic collision takes place. Until the advent of modern instrumentation, the ballistic pendulum was widely used to measure the speed of projectiles.
In this device, a projectile is fired into a suspended heavy wooden block. The wooden block is initially stationary. Following the collision the projectile becomes embedded in the block. Some kinetic energy gets transformed into heat, sound, and used to deform the block. However, momentum must still be conserved. Consequently, the block swings away at some speed. After the collision, the block behaves as a pendulum in which total mechanical energy is conserved. Because of this we can use the maximum height of the swing to determine the kinetic energy of the block after the collision, then using conservation of momentum we can find the initial speed of the projectile.

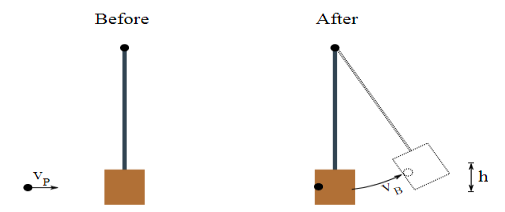

Figure 1:
An inelastic collision in a ballistic pendulum.
We know that only momentum is conserved in this collision, so the momentum of the projectile before the collision must be equal to the momentum of the projectile-block system immediately after the collision. Here we use the subscriptB for the block, P for the projectile. vBis the velocity of the block just after the impact.
mpvp = (mB+mP) vB
After re-arranging:
vB = mpvp /(mB+mP)
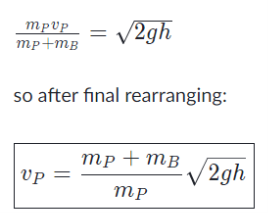
We know that after the collision, the mechanical energy of the block-bullet system is conserved, so if the block rises up to a maximum height h under a gravitational acceleration g then:
½ (mB+mP) v2B+ /(mB+mP)gh
After re-arranging:
v2B= 2gh
Substituting into our previous conservation of momentum expression for the initial velocity of the block:
K.E. Lost in Inelastic Collision
In the special case where two objects stick together when they collide, the fraction of the kinetic energy which is lost in the collision is determined by the combination of conservation of energy and conservation of momentum.
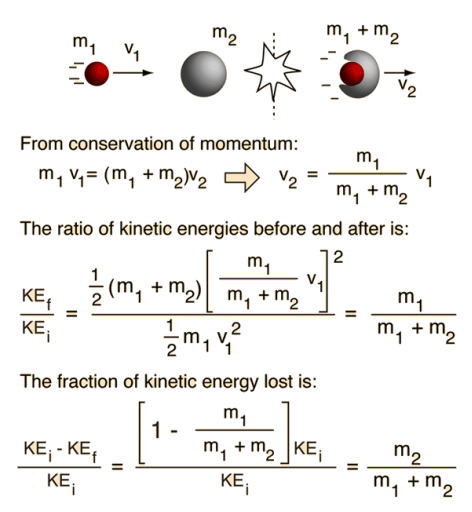
One of the practical results of this expression is that a large object striking a very small object at rest will lose very little of its kinetic energy. If your car strikes an insect, it is unfortunate for the insect but will not appreciably slow your car. On the other hand, if a small object collides inelastically with a large one, it will lose most of its kinetic energy.




