Unit - 2
Z and Inverse Z transform
The most important use of z-transform is its ability to completely characterise signals and linear systems in the most general ways possible. The z-transform is primarily used to convert the discrete time domain signal into discrete frequency domain signal. The z-transform for LTI system is defined as
H(z)=
Properties of the Z- Transform
Linearity
If X1(z) = Z{x1(n)} and X2(z) = Z{x2(n)}
Then
Z{ax1(n) + bx2(n)} = a X1(z) + b X2(z)
Proof:
Z{ax1(n) + b x2(n) }=  z-n
z-n
= a  z-n + b
z-n + b  z-n
z-n
= a X1(z) + b X2(z)
Time Shifting
If X(z) = Z{x(n)} and initial conditions for x(n) are zero then
Z{x(n-m) } = z-m X(z)
Where m is a positive integer.
Proof:
Z {x(n-m)} =  z-n
z-n
Let n-m = p then n= p+m
Z{x(n-m)} =  z –(m+p)
z –(m+p)
z-m  z-p = z-m X(z)
z-p = z-m X(z)
Multiplication by exponential sequence
If X(z ) = Z{x(n)} then
Z [ an x(n) ] = X(a-1 z)
Proof:
Z{ an x(n) } =  an z-n
an z-n
=  (az-1)n
(az-1)n
= X(az-1)
Convolution
We know that
Z{x(n) * h(n) } = X(z) H(z)
Proof:
Let y(n) = x(n) * h(n)
y(n)= 
Taking z-transform on both sides we obtain
Y(z) =
 z-n
z-n
 z-k
z-k  z –(n-k) Replacing n-k by l
z –(n-k) Replacing n-k by l
 z-k
z-k  z-l
z-l
= X(k) Z(k)
Time Reversal
If X(z) = Z{x(n)} then
Z{x(-n)} = X(z-1}
Proof:
Z{x(-n)} =  ( z-l) -1 l=-n
( z-l) -1 l=-n
= X(z-1)
Multiplication by n
If Z{x(n)} = X(z) then
Z{n x(n)} = -z d/dz X(z)
X(z) = 
Z{n x(n)} = 
= z  -1
-1
= z 
= -z  }
}
= -z d/dz { 
= -z d/dz X(z)
Key takeaway
Property | Time Domain | z-Domain | ROC |
Notation |  |  |  |
|   |   |   |
Linearity |  |  | At least  |
Time shifting |  |  | At least ROC, except     |
z-scaling |  |  |  |
Time reversal |  |  |  |
Conjugation |  |  | ROC |
z-differentiation |  |  |  |
Convolution |  |  | At least  |
- Find the z-transform of the sequence
x(n) = a n-1 u(n-1)
We know that x(n) = an u(n) is
X(z) = 1/1/az-1
By using time shifting property we have Z{ x(n-k)} = z-k X(z)
Therefore
Z{an-1 u(n-1)} = z-1/ 1-az-1 = 1/z-a. ROC |z| > |a|
2. Find the z-transform of the sequence
x(n) = an cos nπ/2
Z{ cos w0n} = 1- (cos w0) z-1/ 1 –(2 cos w0) z-1 + z-2
Since w0=π/2
Z{ cos π/2 n u(n)} = 1/1 + z-2
Using exponential sequence property
Z{ an x(n) } = X(a-1 z)
Z{ an cos nπ/2} = 1/1+(a-1z)-2 = 1/ 1 + a2/z2 = z2/ a2 + z2
3. Find the z transform of the sequence x(n) = n u(n)
The z-transform of unit step sequence is given by
Z{u(n)} = z/z-1
Z{ n u(n)} = -z d/dz (z/z-1)
= z/(z-1)2
4. If x(n) = x1(n) * x2(n) where x1(n) = (1/3)n u(n) and x2(n) = (1/5)n u(n). Find X(z) by using convolution property.
X1(z) = 1/ 1- (1/3)z-1 X2(z) = 1/1- (1/5) z-1
X(z) = 1/1-(1/3)z-1 . 1/1-(1/5) z-1
Using z-transform find the convolution of two sequences.
x1(n) = {1,2,-1,0,3} x2(n) = { 1,2,-1}
Z{ x1(n) * x2(n)} = X1(z) . X2(z)
X1(z) = 1 + 2z-1 – z-2 + 3 z-4
X2(z) = 1 + 2z-1 – z-2
(1 + 2z-1 – z-2 + 3 z-4 ) (1 + 2z-1 – z-2 )
= 1 + 4z-1 + 2z-2 – 4 z- 3 + 4 z-4 + 6 z- 5 – 3 z-6
5. Determine the z-transform of the signal
x(n ) = rn (sin w0n ) u(n)
Z{(sin w0n ) u(n)} = sin w0 z-1/ 1 -2 (cos w0) z-1 + z-2
Z{ an x(n)} = X(a-1 z)
Therefore
Z{ rn sin(w0n) u(n) } = (sin w0) (r-1 z)-1/ 1- 2 (cos w0)(r-1z)-1 + (r-1z)-2
= r(sinw0) z-1/ 1-2r(cos w0) z-1 + r2 z-2
6. Determine the signal x(n) whose z-transform is given by
X(z) = log(1- az-1).
X(z)= log(1-az-1)
Differentiating both sides we get
d/dz X(z) = 1/1-az-1 (a z-2) = az-2/1- az-1
-z d/dz { X(z)} = -az-1/1-az-1
= -az-1[ 1/1-az-1]
= -a Z[ a n-1 u(n-1)] -------- (1)
From differentiation property
Z{ n x(n)} = -z d/dz [ X(z)] ------- (2)
Comparing (1) and (2) we get
n x(n) = -a [ a n-1 u(n-1)]
Or x(n) = -a [a n-1 u(n-1)]/n
7. Determine the z-transform of the signal
x(n) =1/2 (n2 + n) (1/3) n-1 u(n-1)
=½ n2 (1/3) n-1 u(n-1) +1/2 n (1/3) n-1 u(n-1)
We know that
Z[(1/3) n u(n)] = z/ z-1/3
Using time-shifting property
Z{(1/3) n-1 u(n-1)] = 1/ z- 1/3
Z [ n (1/3) n-1 u(n-1)] = -z d/dz [1/z-(1/3)]
=-z d/dz( 1/z-1/3)= -z [-1/(z-1/3) 2]= z/ (z-1/3)2
Z [ n2 (1/3) u(n-1)] = -z d/dz [ z/(z-1/3)2]
= z(z+1/3)/(z-1/3)2
= -z [ (z-1/3)2 -2z(z-1/3)/(z-1/3)4
= z(z+1/3)/(z-1/3)3
X(z) = ½[z(z+1/3)/(z-1/3)3 + z/ (z-1/3)2]
= z2/(z-1/3)3
Formal inverse z-transform is based on a Cauchy integral
• Less formal ways sufficient most of the time – Inspection method – Partial fraction expansion – Power series expansion
• Inspection Method – Make use of known z-transform pairs such as
anu[n] 1/ (1-az-1) |z| > |a|
Power series method
The z-transform of the sequence x(n) is given by

Gives the expansion in power series form. From power series we get the following sequence:
x(n) = {∙∙∙∙∙∙∙∙∙∙x(−2), x(−1), x(0), x(1), x(2), ∙∙∙∙∙∙∙∙∙∙∙}
It is possible to get the power series expansion directly or by long division. In power series expansion technique ROC has a vital role.
Partial fraction expansion method
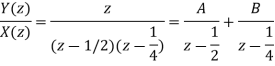
Find the partial fraction method of
By solving A= 1 and B=-1
Therefore,
x(n) = (1/2) n u(n) – (1/4) n u(n)
Find the partial fraction of



By taking inverse z-transform both sides we get

Solution of difference equations using Z transform
Z transform converts the difference into algebraic equation in z-domain.
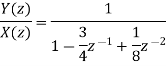
Find the impulse response and step response for the following systems:
y(n) = - ¾ y(n-1) + 1/8 y(n-2) = x(n)
y(n) - ¾ y(n-1) + 1/8 y(n-2) = x(n)
Taking z-transform on both sides we get
Y(z) – ¾ [ z-1 Y(z) + y(-1) ] +1/8 [ z-2 Y(z) + z-1 y(-1)+y(-2)] = X(z)
Substituting y(-1)=y(-2)= 0
Y(z) -3/4 z-1 Y(z) + 1/8 z-2 Y(z) = X(z)
Impulse response
x(n) =  X(z) =1
X(z) =1
By solving A=2 and B=-1.
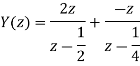
y(n) = 2 (1/2)n u(n) – (1/4) n u(n).
Step Response
x(n) = u(n) X(z) = z/z-1
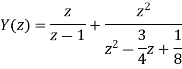
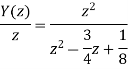
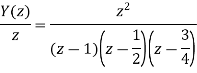
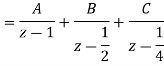
By solving A=8/3 B= -2 C= 1/3
Therefore
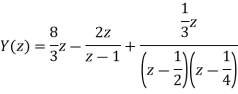
y(n) = 8/3 u(n) – 2(1/2)n u(n) +1/3 (1/4) n u(n)
Que) Find the inverse z-transform of X(z)= . Using partial fraction method. ROC |z|>2?
. Using partial fraction method. ROC |z|>2?
Sol: X(z)=
Dividing both sides by z
 =
=
 =
= +
+
3=A(z-2)+Bz
Equating coefficients of z and z0 on both sides we get
A+B=0
-2A+B=3
Solving above two equations and we get A=-3/2 and B=3/2
 =
= +
+
X(z)= +
+
Taking inverse of above equation
X[n]= +
+ (2)nu(n)
(2)nu(n)
Key takeaway
The methods used for finding inverse z-transform are partial fraction method and power series method.
Consider the first order difference equation
yn+1 − 3yn = 4 n = 0, 1, 2, . . .
The equation could be solved in a step-by-step or recursive manner, provided that y0 is known because
y1 = 4 + 3y0
y2 = 4 + 3y1
y3 = 4 + 3y2 and so on
This process will certainly produce the terms of the solution sequence {yn} but the general term yn may not be obvious.
So consider
yn+1 − 3yn = 4 n = 0, 1, 2, . . . (1)
With initial condition y0 = 1.
We multiply both sides of (1) by z −n and sum each side over all positive integer values of n and zero. We obtain
 (2)
(2)
The three terms in (2) are clearly recognisable as z-transforms. The right-hand side is the z-transform of the constant sequence {4, 4, . . .} which is 4z/z − 1 .
Consequently (2) can be written
 (3)
(3)
Equation (3) is the z-transform of the original difference equation (1). The intervening steps have been included here for explanation purposes but we shall omit them in future. The important point is that (3) is no longer a difference equation. It is an algebraic equation where the unknown, Y (z), is the z-transform of the solution sequence {yn}. We now insert the initial condition y0 = 1 and solve (3) for Y(z):

(4)
The final step consists of obtaining the sequence {yn} of which (4) is the z-transform. As it stands (4) is not recognizable as any of the standard transforms that we have obtained. Consequently, one method of ‘inverting’ (4) is to use a partial fraction expansion.
Thus  (in partial fractions)
(in partial fractions)
Now, taking inverse z-transforms, the general term  is , using linearity property,
is , using linearity property,

The symbolic notation  is common and is short for ‘the inverse z-transform of’
is common and is short for ‘the inverse z-transform of’
Using standard z-transforms write down  explicitly, where
explicitly, where

From this solution (5)
yn = −2 + 3n+1 we easily obtain
y0 = −2 + 3 = 1 (as given)
y1 = −2 + 32 = 7
y2 = −2 + 33 = 25
y3 = −2 + 34 = 79

Which yields



If 
Then 
And 
Then 
And 
So, on the left-hand side of (1)

Key takeaway
To solve a linear constant coefficient difference equation, three steps are involved:
1. Replace each term in the difference equation by its z-transform and insert the initial condition(s). 2. Solve the resulting algebraic equation. (Thus gives the z-transform Y (z) of the solution sequence.) 3. Find the inverse z-transform of Y (z).
The z transform is used to find the solution of linear differential equation with constant coefficients. Considering the sequence of form x[n-m], where m=1. Therefore, from definition of z-transform
Z{x[n-1]} = 
=x(-1)+x(0)z-1+x(1)z-2+x(2)z-3+……..
=x(-1)+z-1[x(0)+x(1)z-1+x(2)z-2+……..]
Z{x[n-1]}=x(-1)+z-1X(z)
Generalised form can be Z[x(n-m)]=z-mZ[X(z)]
Z [x (n + 1)] = zZ [x (n)] − zx (0) = z [X (z) − x (0)]
Z[x(n+2)] = z2 [X (z) − x (0) -  ]
]
Z[x(n+3)] = z3 [X (z) − x (0) -  -
-  ]
]
Procedure for solution of difference equation
(i) Apply Z-transform on both sides of given difference equation.
(ii) Expand formulae.
(iii) Take Z[x(n)] as one side of the equation and remaining other side.
(iv) Take Z −1 on both sides.
(v) Apply partial fraction or power series method to find IZT.
Que) Solve the second order difference equation 2x(n-2)-2x(n-1)+x(n)=3n-2 n>0, where x(-2)=-4/9 and x(-1)=-1/3?
Sol: Taking Z-transform of both sides
Z[ 2x(n-2)-2x(n-1)+x(n)]=Z[3n-2 ]
Using the above equation of generalised form we get
2[z-2X(z)+z-1x(-1)+x(-2)]-3[z-1X(z)+x(-1)]+X(z)=3-2. 
Already given x(-2)=-4/9 and x(-1)=-1/3
Finally, substituting the values and solving above equation we get
X(z)=
X(z)/z=
Now by partial fraction method we get
 =
= +
+ 
z=A(z-3)+B(z-1)
A+B=1
-3A-B=0
Solving above equations and finding A and B
A=-1/2 B=3/2
 =
= +
+ 
X(z)= +
+ 
X(z)= [
[ +
+ 
Taking inverse transform of above equation, we get (refer table of z-transform)
x[n]=  [3n-1] n>0
[3n-1] n>0
The range of variation of z for which z-transform converges is called region of convergence of z-transform.
Properties of ROC of Z-Transforms
- ROC does not contain any poles.
- If x(n) is a finite sequence and x(z) converges for some value of z, then ROC can be entire z plane except at z=0 and ∞.
- If x(n) is a right sided sequence and x(z) converges for some value of z, then the ROC is the of the form |z|>Rmax where Rmax is the radius.
- If x(n) is left sided sequence and x(z) converges for some value of z then the ROC is of the form |z|<Rmin where Rmin is the smallest magnitude of any pole of x(z). Thus, the ROC is the entire circle having Rmin.
- If x(n) is a double sided sequence and x(z) converges for some value of z then the ROC is of the form
R1 <|z| < R2
Rmin < |z| <Rmax.
Where R1, R2 are the magnitude of two poles of x(z)
Initial Value and Final Value Theorems
Initial value and final value theorems of z-transform are defined for causal signal.
Initial Value Theorem
For a causal signal x(n), the initial value theorem states that
x(0) = ltz→∞X(z)
This is used to find the initial value of the signal without taking inverse z-transform
Final Value Theorem
For a causal signal x(n), the final value theorem states that
x(∞) = ltz→1[z−1]X(z)
This is used to find the final value of the signal without taking inverse z-transform.
Key takeaway
ROC does not contain any pole.
Find the z-transform and ROC of the signal
x(n) = an u(n)
Solution:
X(z) = 
=  an u(n) -----(1) u(n) = 0 for n<0
an u(n) -----(1) u(n) = 0 for n<0
1 for n≥0
=  an ------- (2)
an ------- (2)
=  n ------- (3)
n ------- (3)
This is a geometric series of infinite length that is
a + ar + ar2 + ………….. ∞ = a /1-r if |r| <1
Then from equation (3) it converges when |az-1| < 1 or |z| >|a|
Therefore
X(z) = 1/ 1-az-1: ROC |z| > |a|
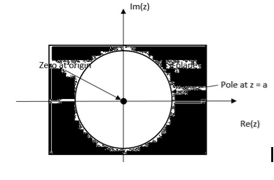
Fig: ROC |z|>|a|
Find the z-transform of the signal x(n) =-b n u(-n-1). Find ROC
X(z) = 
X(z) =  bn u(-n-1) u(-n-1) =0 for n ≥0
bn u(-n-1) u(-n-1) =0 for n ≥0
= 1 for n ≤ -1
=  bn =
bn =  b-1 =
b-1 =
= b-1z/1- b-1z = z/ z-b = 1/ 1-bz-1 |z| < |b|
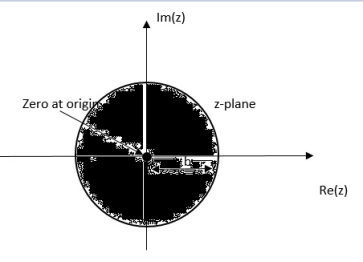
Fig: ROC |z|<|b|
Find the z-transform of x(n) = an u(n) – bn u(-n-1)
X(z) = 
=  n +
n +  b-1
b-1
= z/z-a + z/z-b ROC |a| < |z| < |b|
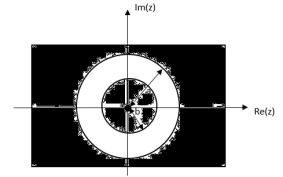
Fig: ROC |a| < |z| < |b|
|b|< |a|
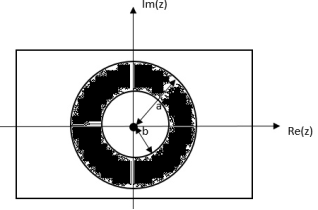
Fig: ROC |b|< |a|
|b| >|a|
Find the z-transform of x(n) = {1,2,3,2}
Given x(0) = 1 x(1) =2 x(2) =3 x(3) = 2
X(z) = 
X(z) = 1+ 2z-1 + 3 z-2 +2 z-3
References:
1. Mitra S., “Digital Signal Processing: A Computer Based Approach”, Tata McGraw-Hill,1998, ISBN 0-07-044705-5
2. A.V. Oppenheim, R. W. Schafer, J. R. Buck, “Discrete Time Signal Processing”, 2nd Edition Prentice Hall, ISBN 978-81-317-0492-9
3. Steven W. Smith, “Digital Signal Processing: A Practical Guide for Engineers and Scientists”,1st Edition Elsevier, ISBN: 9780750674447




