UNIT-5
Matrices
The rank of a matrix is the largest order of the non-zero minor of the matrix (we search at least one nonzero minor to find the rank of the matrix).
A matrix A is said to have the rank r if and only if there exist at least one nonzero minor of the given matrix of order r and every minor greater than order r is zero.
This is denoted by  .
.
Normal form of a matrix:
Every non-singular matrix A of rank r can be converted by applying sequence of the elementary transformation in the form of

Is called the normal form of the matrix A.
Also, the rank of a matrix can be calculated by converting it into normal form then the order of identity matrix obtained is the rank of the given matrix.
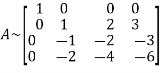
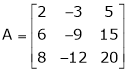
Example1: Reduce the following matrix into normal form and find its rank,

Let A = 
Apply  we get
we get
A 
Apply  we get
we get
A 
Apply 
A 
Apply 
A 
Apply 
A 
Hence the rank of matrix A is 2 i.e.  .
.
Example2: Reduce the following matrix into normal form and find its rank,
Let A = 
Apply  and
and 
A
Apply 
A
Apply 
A
Apply 
A
Apply 
A
Hence the rank of the matrix A is 2 i.e.  .
.
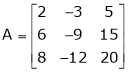
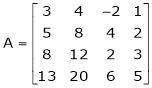
Example3: Reduce the following matrix into normal form and find its rank,
Let A = 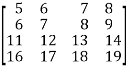
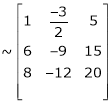
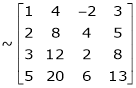
Apply 
Apply 
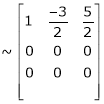
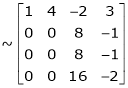
Apply 
Apply 
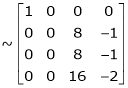
Apply  and
and 
Apply 
Hence the rank of matrix A is 2 i.e.  .
.
- The rank of matrix remains unchanged by elementary transformations. i.e. from a matrix. A we get another matrix B by using some elementary transformation. Then
Rank of A = Rank of B
2. Equivalent matrices:
The matrix B is obtained from a matrix A by a sequence of a finite no. Of elementary transformations is said to be equivalent to A. And we write.

Normal form or canonical form:
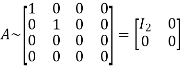
Every mxn matrix of rank r can be reduced to the form 
By a finite sequence of elementary transformation. This form is called normal form or the first canonical form of the matrix A.
Ex. 1
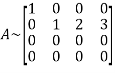
Reduce the following matrix to normal form of Hence find it’s rank,
Solution:
We have,


Apply 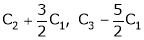


 Rank of A = 1
Rank of A = 1
Ex. 2
Find the rank of the matrix
Solution:
We have,
Apply R12









 Rank of A = 3
Rank of A = 3
Ex. 3
Find the rank of the following matrices by reducing it to the normal form.
Solution:
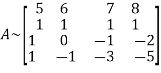
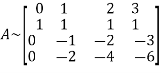
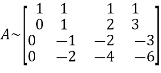
Apply C14








H.W.
Reduce the follo9wing matrices in to the normal form and hence find their ranks.
a) 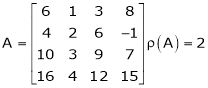
b) 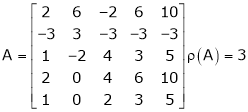
- Reduction of a matrix a to normal form PAQ.
If A is a matrix of rank r, then there exist a non – singular matrices P & Q such that PAQ is in normal form.
i.e. 
To obtained the matrices P and Q we use the following procedure.
Working rule:-
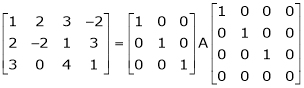
- If A is a mxn matrix, write A = Im A In.
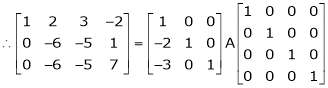
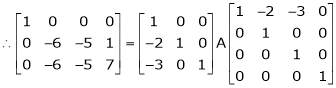
- Apply row transformations on A on l.h.s. And the same row transformations on the prefactor Im.
- Apply column transformations on A on l.h.s and the column transformations on the postfactor In.
So that A on the l.h.s. Reduces to normal form.
Example 1
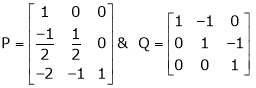
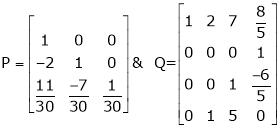
If 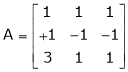 Find Two
Find Two
Matrices P and Q such that PAQ is in normal form.
Solution:
Here A is a square matrix of order 3 x 3. Hence we write,
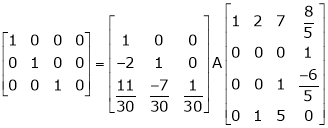
A = I3 A.I3
i.e. 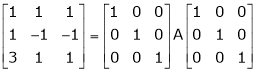



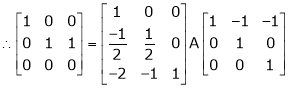

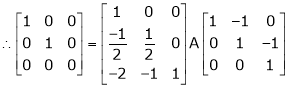
i.e. 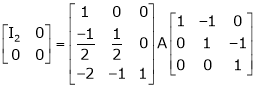

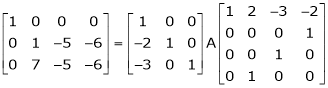
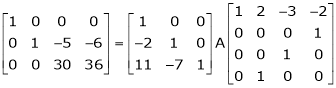
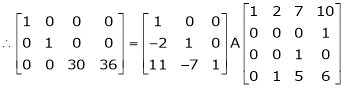
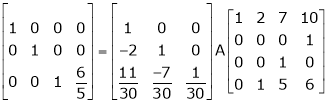
Example 2
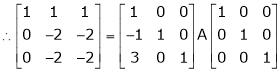
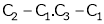
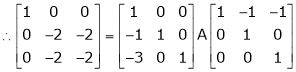
Find a non – singular matrices p and Q such that P A Q is in normal form where
Solution:
Here A is a matrix of order 3 x 4. Hence we write A as,

i.e.








i.e. 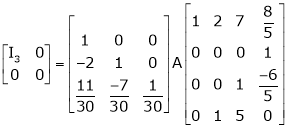

Symmetric matrix: In linear algebra, a symmetric matrix is a square matrix that is equal to its transpose. Formally, because equal matrices have equal dimensions, only square matrices can be symmetric. The entries of a symmetric matrix are symmetric with respect to the main diagonal. So, if aᵢⱼ denotes the entry in the i-th row and j-th column then for all indices i and j. Every square diagonal matrix is symmetric, since all off-diagonal elements are zero.
Example1: Let us test whether the given matrices are symmetric or not i.e., we check for ,
A = 
(1) A = 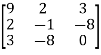

 Now
Now
 =
=
 A =
A = 
Hence the given matric symmetric
Example2: let A be a real symmetric matrix whose diagonal entries are all positive real numbers.
Is this true for all of the diagonal entries of the inverse matrix A-1 are also positive? If so, prove it. Otherwise give a counter example
Solution: The statement is false, hence we give a counter example
Let us consider the following 2 2 matrix
2 matrix
A = 
The matrix A satisfies the required conditions, that is A is symmetric and its diagonal entries are positive.
The determinant det(A) = (1)(1)-(2)(2) = -3 and the inverse of A is given by
A-1=  =
= 
By the formula for the inverse matrix for 2 2 matrices.
2 matrices.
This shows that the diagonal entries of the inverse matric A-1 are negative.
Skew-symmetric: A skew-symmetric matrix is a square matrix that is equal to the negative of its own transpose. Anti-symmetric matrices are commonly called as skew-symmetric matrices.
Example3:Let A and B be n n skew-matrices.Namely AT = -A and BT = -B
n skew-matrices.Namely AT = -A and BT = -B
(a) Prove that A+B is skew-symmetric.
(b) Prove that cA is skew-symmetric for any scalar c.
(c) Let P be an m n matrix.Prove that PTAP is skew-symmetric.
n matrix.Prove that PTAP is skew-symmetric.
Solution: (a) (A+B)T = AT + BT = (-A)+(-B) = -(A+B)
Hence A+B is skew symmetric.
(b) (cA)T = c.AT =c(-A) = -cA
Thus, cA is skew-symmetric.
(c)Let P be an m n matrix. Prove that PT AP is skew-symmetric.
n matrix. Prove that PT AP is skew-symmetric.
Using the properties, we get,
(PT AP)T = PTAT(PT)T = PTATp
= PT (-A) P = - (PT AP)
Thus (PT AP) is skew-symmetric.
Orthogonal matrix: An orthogonal matrix is the real specialization of a unitary matrix, and thus always a normal matrix. Although we consider only real matrices here, the definition can be used for matrices with entries from any field.
Suppose A is a square matrix with real elements and of n x n order and AT is the transpose of A. Then according to the definition, if, AT = A-1 is satisfied, then,
A AT = I
Where ‘I’ is the identity matrix, A-1 is the inverse of matrix A, and ‘n’ denotes the number of rows and columns.
Example4: prove Q=  is an orthogonal matrix
is an orthogonal matrix
Solution: Given Q = 
So, QT =  …..(1)
…..(1)
Now,we have to prove QT = Q-1
Now we find Q-1
Q-1 = 
Q-1 = 
Q-1 = 
Q-1 =  …(2)
…(2)
Now, compare (1) and (2) we get QT = Q-1
Therefore, Q is an orthogonal matrix.
In linear algebra, an eigenvector (/ˈaɪɡənˌvɛktər/) or characteristic vector of a linear transformation is a nonzero vector that changes at most by a scalar factor when that linear transformation is applied to it. The corresponding eigenvalue, often denoted by λ, is the factor by which the eigenvector is scaled. Geometrically, an eigenvector, corresponding to a real nonzero eigenvalue, points in a direction in which it is stretched by the transformation and the eigenvalue is the factor by which it is stretched.
In order to find eigenvalues of a matrix, following steps are to followed:
Step 1: Make sure the given matrix A is a square matrix. Also, determine the identity matrix I of the same order.
Step 2: Estimate the matrix A– λ I, where λ is a scalar quantity.
Step 3: Find the determinant of matrix A–λ I and equate it to zero.
Step 4: From the equation thus obtained, calculate all the possible values of λ which are the required eigenvalues of matrix A.
Example1: Find the eigenvalues for the following matrix?

Solution: Given 







Hence the required eigenvalues are 6 and 1
Example 2: Find the eigenvalues of a 
Solution: Let A= 
Then,




These are required eigenvalues.
A square n×n matrix A over a field F is called diagonalizable or nondefective if there exists an invertible matrix P such that P-1AP is a diagonal matrix. Formally,
 A
A diagonalizable
diagonalizable
 :P-1AP diagonal
:P-1AP diagonal
Let A be the n×n matrix that you want to diagonalize (if possible).
- Find the characteristic polynomial p(t)of A.
- Find eigenvalues λ of the matrix A and their algebraic multiplicities from the characteristic polynomial p(t).
- For each eigenvalue λ of A, find a basis of the eigenspace Eλ.
If there is an eigenvalue λ such that the geometric multiplicity of λ, dim(Eλ), is less than the algebraic multiplicity of λ, then the matrix A is not diagonalizable. If not, A is diagonalizable, and proceed to the next step. - If we combine all basis vectors for all eigenspaces, we obtained n linearly independent eigenvectors
 ,
, ,….
,….
- Define the non-singular matrix S= [
 ,
, ,….
,…. ].
].
6. Define the diagonal matrix D, whose (i, i)-entry is the eigenvalue λ such that the ii-th column vector vi is in the eigenspace Eλ.
7. Then the matrix A is diagonalized as
S -1 AS=D.
Example1: Let us consider the following 3 ×3 matrix
A = 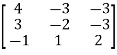
Solution: We want to diagonalize the matrix if possible.
Step 1: Find the characteristic polynomial
The Charcterstic polynomial p(t) of A is

Using the cofactor expansion, we get

Step2: From the characteristic polynomial obtained step1, we see that eigenvalues are

And 
Step2: Find the eigenspaces
Let us first find the eigenspaces  corresponding to the eigenvalue
corresponding to the eigenvalue 
By definition,  is the null space of the matrix
is the null space of the matrix

By elementary row operations.
Hence if (A-I)x=0 for x

Therefore, we have
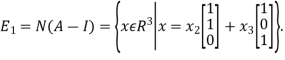
From this, we see that the set

Is a basis for the eigenvalues 
Thus, the dimension of  , which is the geometric multiplicity of
, which is the geometric multiplicity of
Similarly, we find a basis of the eigenspaces 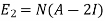 for the eigenvalue
for the eigenvalue  We have
We have

By elementary row operations.
Then if (A-2I) x=0 for x

Therefore we obtain
From this we see that the set

 and the geometric multiplicity is 1.
and the geometric multiplicity is 1.
Since for both eigenvalues, the geometric multiplicity is equal to the algebraic multiplicity, the matrix A is not defective, and hence diagonalizable.
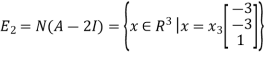
Step4: Determine linearly independent eigenvectors
From step3, the vectors
Are linearly independent eigenvectors.
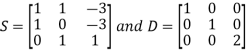
Step5: Define the invertible matrix S
Define the matrix S=
S=
And the matrix S is non-singular (since the column vectors are linearly independent).
Step 6: Define the diagonal matrix D
Define the diagonal matrix
Note that (1,1) entry of D is 1 because the first column vector 
Of S is in the eigenvalues  that is
that is  is an eigenvector corresponding to eigenvalue
is an eigenvector corresponding to eigenvalue 
Similarly, the (2,2) entry of D is 1 because the second column  of S is in
of S is in  .
.
The (3,3)entry of D is 2 because the third column vector  of S is in
of S is in 
(The order you arrange the vector  to form S does not matter but once you made S, then the order of the diagonal entries is determined by S, that is , the order of eigenvectors on S)
to form S does not matter but once you made S, then the order of the diagonal entries is determined by S, that is , the order of eigenvectors on S)
Step7: Finish the diagonalization
Finally, we can diagonalize the matrix A as

Where
(Here you don’t have to find the inverse matrix  unless you are asked to do so).
unless you are asked to do so).
In linear algebra, the Cayley–Hamilton theorem (termed after the mathematicians Arthur Cayley and William Rowan Hamilton) says that every square matrix over a commutative ring (for instance the real or complex field) satisfies its own characteristic equation. If A is a provided as n×n matrix and In is the n×n identity matrix, then the distinctive polynomial of A is articulated as:
P(x) = det (xIn – A)
Where the determinant operation is ‘det’ and for the scalar element of the base ring, the variable is taken as x. As the entries of the matrix are (linear or constant) polynomials in x, the determinant is also an n-th order monic polynomial in x.
Example 1:
Verify the Cayley-Hamilton theorem for A=
Solution:
The characteristic equation of A is
P( ) =
) = =
= 


 =
= 

Therefore cayley-hamilton theorem is verified.
Example 2:
Verify cayley-hamilton theorem for the following matrix:
A =  for
for 
Solution:


 =
= 

 =
= 

 =
= -6
-6  + 2
+ 2


=
Hence theorem verified.
Orthogonal transformation: A linear transformation T from Rn to Rn is orthogonal if it preserves the length of vectors.
 =
= 
If  is an orthogonal transformation, then we say that A is an orthonormal matrix.
is an orthogonal transformation, then we say that A is an orthonormal matrix.
Example: Diagonalize the matrix 
Solution: Let A = 
Step 1: To find the characteristic equation:
The characteristic equation of A is 
In general,  where
where




Step 2: To solve the characteristic equation.




 =
=
Step 3: To find the eigen vector :
To find the eigen vector solve (A- )x=0
)x=0
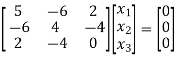
i.e. 
Case(i): when  , it becomes,
, it becomes,



Solving (1) & (2) by cross-multiplication, we get

Hence the corresponding eigenvector is 
Case(ii): when  the equation (A) becomes
the equation (A) becomes



Solving (3) and (6) using cross-multiplication, we get


Case(iii): when  in (A)
in (A)
We get the corresponding eigen vector 

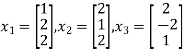
To prove these eigen vectors are orthogonal i.e. 



Hence the eigenvectors are orthogonal to each other
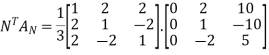
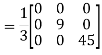
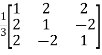
Step 4: To form the normalised matrix N

=
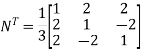
Step 5: Find 
Step 6: Calculate 
=
Step 7: Calculate