Unit - 4
Matrix Algebra- I
- Definition:
An arrangement of m.n numbers in m rows and n columns is called a matrix of order mxn.
Generally a matrix is denoted by capital letters. Like, A, B, C, ….. Etc.
2. Types of matrices:- (Review)
- Row matrix
- Column matrix
- Square matrix
- Diagonal matrix
- Trace of a matrix
- Determinant of a square matrix
- Singular matrix
- Non – singular matrix
- Zero/ null matrix
- Unit/ Identity matrix
- Scaler matrix
- Transpose of a matrix
- Triangular matrices
Upper triangular and lower triangular matrices,
14. Conjugate of a matrix
15. Symmetric matrix
16. Skew – symmetric matrix
3. Operations on matrices:
- Equality of two matrices
- Multiplication of A by a scalar k.
- Addition and subtraction of two matrices
- Product of two matrices
- Inverse of a matrix
4. Elementary transformations
a) Elementary row transformation
These are three elementary transformations
- Interchanging any two rows (Rij)
- Multiplying all elements in ist row by a non – zero constant k is denoted by KRi
- Adding to the elements in ith row by the kth multiple of jth row is denoted by
 .
.
b) Elementary column transformations:
There are three elementary column transformations.
- Interchanging ith and jth column. Is denoted by Cij.
- Multiplying ith column by a non – zero constant k is denoted by kCj.
- Adding to the element of ith column by the kth multiple of jth column is denoted by Ci + kCj.
Rank of a matrix:
Let A be a given rectangular matrix or square matrix. From this matrix select any r rows from these r rows select any r columns thus getting a square matrix of order r x r. The determinant of this matrix of order r x r is called minor or order r.
e.g.
If 
For example select 2nd and 3rd row. i.e.
Now select any two columns. Suppose, 1st and 2nd.
i.e. 
Determinant :
In linear algebra, determinant is a special number that can be determined from a square matrix. The determinant of a matrix, say P is denoted de t(P), |P| or det P. Determinants have some properties that are useful as they permit us to generate the same results with different and simpler configurations of entries (elements). There are 10 main properties of determinants which include reflection property, all-zero property, proportionality or repetition property, switching property, scalar multiple property, sum property, invariance property, factor property, triangle property, and co-factor matrix property. All the determinant properties have been covered below in a detailed way along with solved examples.
Properties of a determinant:
1. Reflection Property:
The determinant remains unaltered if its rows are changed into columns and the columns into rows. This is known as the property of reflection.
2. All-zero Property:
If all the elements of a row (or column) are zero, then the determinant is zero.
3. Proportionality (Repetition) Property:
If the all elements of a row (or column) are proportional (identical) to the elements of some other row (or column), then the determinant is zero.
4. Switching Property:
The interchange of any two rows (or columns) of the determinant changes its sign.
5. Scalar Multiple Property:
If all the elements of a row (or column) of a determinant are multiplied by a non-zero constant, then the determinant gets multiplied by the same constant.
6. Sum Property:
 =
=  +
+ 
7. Property of Invariance:
 =
= 
That is, a determinant remains unaltered under an operation of the form
 , j ,k ≠ i or an operation of the form
, j ,k ≠ i or an operation of the form
R i  Ri +
Ri +  Rj +
Rj +  R K , j, k ≠ i
R K , j, k ≠ i
8. Factor Property:
If a determinant Δ becomes zero when we put X= ,Then (x−α) is a factor of Δ.
,Then (x−α) is a factor of Δ.
9. Triangle Property:
If all the elements of a determinant above or below the main diagonal consist of zeros, then the determinant is equal to the product of diagonal elements. That is,
 =
=  =
=  1 =
1 =  =
= 
10. Determinant of cofactor matrix:
 =
=  =
= , where
, where  denotes the co-factor of
denotes the co-factor of
The element  in
in 
Example 1:
 = ( a+b+c)(ab+bc+ca-a2 –b2 –c2)
= ( a+b+c)(ab+bc+ca-a2 –b2 –c2)
Solution:
By using invariance and scalar multiple property we can prove the given problem.
 =
=  =
=  c1
c1  c1+c2+c3
c1+c2+c3
 (a+b+c)
(a+b+c) 
 (a+b+c)
(a+b+c)  R2
R2  R2 – R1 and R3
R2 – R1 and R3  R3 – R1
R3 – R1
 (a+b+c)
(a+b+c) 
 (a+b+c)(ab+bc+ca-a2-b2 –c2)
(a+b+c)(ab+bc+ca-a2-b2 –c2)
Example 2:
Prove the following identity.,
 = 4
= 4 
Solution:
Take  , from the L.H.S and then by using scalar multiple property and in-variance property of determinant. We can prove the given problem
, from the L.H.S and then by using scalar multiple property and in-variance property of determinant. We can prove the given problem
 =
=
Taking , ,
, common from c1,c2,c3 respectively
common from c1,c2,c3 respectively



Now taking  common from R1,R2 ,R3 respectively.
common from R1,R2 ,R3 respectively.


Now applying R3 R3+R1 we have
R3+R1 we have  =
= 

Now expanding along c1 ,


 (-1)
(-1) 
 (-1)
(-1) =
=  (-1)
(-1) (0-4)=4
(0-4)=4

 =4
=4 .
.
Hence proved.
The rank of a matrix is the largest order of the non zero minor of the matrix( we search at least one non zero minor to find the rank of the matrix).
A matrix A is said to have the rank r if and only if there exist at least one non zero minor of the given matrix of order r and every minor greater than order r is zero.
This is denoted by  .
.
Normal form of a matrix:
Every non singular matrix A of rank r can be converted by applying sequence of the elementary transformation in the form of

Is called the normal form of the matrix A.
Also the rank of a matrix can be calculated by converting it into normal form then the order of identity matrix obtained is the rank of the given matrix.
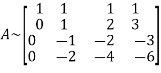
Example1: Reduce the following matrix into normal form and find its rank,

Let A = 
Apply  we get
we get
A 
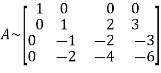
Apply  we get
we get
A 
Apply 
A 
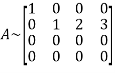
Apply 
A 
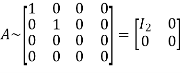
Apply 
A 
Hence the rank of matrix A is 2 i.e.  .
.
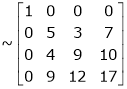
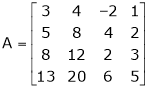
Example2: Reduce the following matrix into normal form and find its rank,
Let A = 
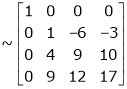
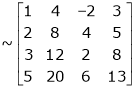
Apply  and
and 
A
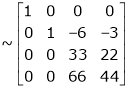
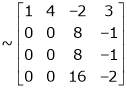
Apply 
A
Apply 
A
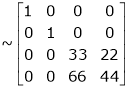
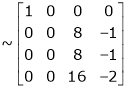
Apply 
A
Apply 
A
Hence the rank of the matrix A is 2 i.e.  .
.
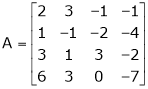
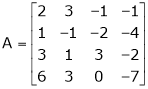
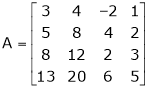
Example3: Reduce the following matrix into normal form and find its rank,
Let A = 
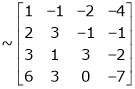
Apply 
Apply 
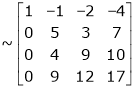
Apply 
Apply 
Apply  and
and 
Apply 
Hence the rank of matrix A is 2 i.e.  .
.
Two square matrix  and A of same order n are said to be similar if and only if
and A of same order n are said to be similar if and only if
 for some non-singular matrix P.
for some non-singular matrix P.
Such transformation of the matrix A into  with the help of non singular matrix P is known as similarity transformation.
with the help of non singular matrix P is known as similarity transformation.
Similar matrices have the same Eigen values.
If X is an Eigen vector of matrix A then  is Eigen vector of the matrix
is Eigen vector of the matrix 
Reduction to Diagonal Form:
Let A be a square matrix of order n has n linearly independent Eigen vectors which form the matrix P such that

Where P is called the modal matrix and D is known as spectral matrix.
Procedure: let A be a square matrix of order 3.
Let three Eigen vectors of A are  corresponding to Eigen values
corresponding to Eigen values 
Let 
 {by characteristics equation of A}
{by characteristics equation of A}
Or 
Or 
Note: The method of diagonalization is helpful in calculating power of a matrix.
 .Then for an integer n we have
.Then for an integer n we have 
We are using the example of 1.6*
Example1: Diagonalize the matrix 
Let A= 
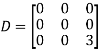
The three Eigen vectors obtained are (-1,1,0), (-1,0,1) and (3,3,3) corresponding to Eigen values  .
.
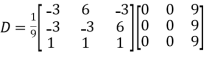
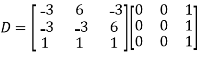
Then 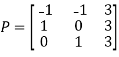 and
and 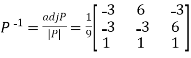
Also we know that 

Example2: Diagonalize the matrix
Let A =
The Eigen vectors are (4,1),(1,-1) corresponding to Eigen values  .
.
Then  and also
and also 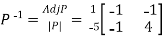
Also we know that 

Given a Matrix, the task is to find the inverse of this Matrix using the Gauss-Jordan method.
What is matrix?
Matrix is an ordered rectangular array of numbers.


3  3 rectangular matrix
3 rectangular matrix
Operations that can be performed on a matrix are: Addition,
The matrix must be a non-singular matrix and,
- There exist an Identity matrix I for which

In general, the inverse of n X n matrix A can be found using this simple formula:
A-1 = 
Where, Adj(A) denotes the adjoint of a matrix and, Det(A) is Determinant of matrix A.
Methods for finding Inverse of Matrix:
Finding the inverse of a 2×2 matrix is a simple task, but for finding the inverse of larger matrix (like 3×3, 4×4, etc) is a tough task, So the following methods can be used:
- Elementary Row Operation (Gauss-Jordan Method) (Efficient)
- Minors, Cofactors and Ad-jugate Method (Inefficient)
Elementary Row Operation (Gauss – Jordan Method):
Gauss-Jordan Method is a variant of Gaussian elimination in which row reduction operation is performed to find the inverse of a matrix.
Steps to find the inverse of a matrix using Gauss-Jordan method:
In order to find the inverse of the matrix following steps need to be followed:
- Form the augmented matrix by the identity matrix.
- Perform the row reduction operation on this augmented matrix to generate a row reduced echelon form of the matrix.
- The following row operations are performed on augmented matrix when required:
- Interchange any two row.
- Multiply each element of row by a non-zero integer.
- Replace a row by the sum of itself and a constant multiple of another row of the matrix.
Example 1:
GIVEN 3 3 RECTANGULAR MATRIX
3 RECTANGULAR MATRIX


The augumented matrix is as follows




- After applying the Gauss-Jordan elimination method:
The inverse of a matrix is as follows .,
EXAMPLE 2:
Find the inverse of
 A=
A= 
Solution:
Step 1: Adjoin the identity matrix to the right side of A:




Step 2: Apply row operations to this matrix until the left side is reduced to I. The computations are:



 R2
R2  R2-R1 , R3
R2-R1 , R3 R3-R1
R3-R1



 R3
R3  R3 + 2R2
R3 + 2R2


 R1
R1 R1 -3R3 , R2
R1 -3R3 , R2  R2+3R3
R2+3R3


 R1
R1 R1-2R2
R1-2R2

Step 3: Conclusion: The inverse matrix is:
A-1 = 
Invariance of rank through elementary transformations.
- The rank of matrix remains unchanged by elementary transformations. i.e. from a matrix. A we get another matrix B by using some elementary transformation. Then
Rank of A = Rank of B
2. Equivalent matrices:
The matrix B is obtained from a matrix A by a sequence of a finite no. Of elementary transformations is said to be equivalent to A. And we write.

Normal form or canonical form:
Every mxn matrix of rank r can be reduced to the form 
By a finite sequence of elementary transformation. This form is called normal form or the first canonical form of the matrix A.
Ex. 1
Reduce the following matrix to normal form of Hence find it’s rank,
Solution:
We have,


Apply 


 Rank of A = 1
Rank of A = 1
Ex. 2
Find the rank of the matrix
Solution:
We have,
Apply R12









 Rank of A = 3
Rank of A = 3
Ex. 3
Find the rank of the following matrices by reducing it to the normal form.
Solution:
Apply C14








H.W.
Reduce the follo9wing matrices in to the normal form and hence find their ranks.
a) 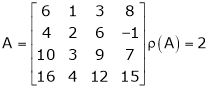
b) 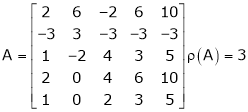
5. Reduction of a matrix a to normal form PAQ.
If A is a matrix of rank r, then there exist a non – singular matrices P & Q such that PAQ is in normal form.
i.e. 
To obtained the matrices P and Q we use the following procedure.
Working rule:-
- If A is a mxn matrix, write A = Im A In.
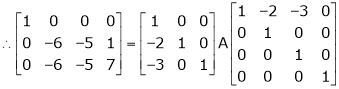
- Apply row transformations on A on l.h.s. And the same row transformations on the prefactor Im.
- Apply column transformations on A on l.h.s and the column transformations on the postfactor In.
So that A on the l.h.s. Reduces to normal form.
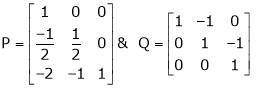
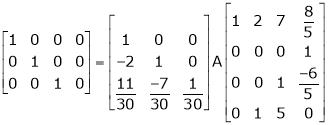
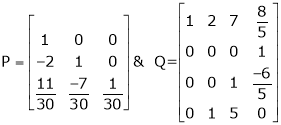
Example 1
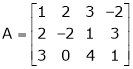
If 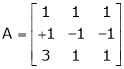 Find Two
Find Two
Matrices P and Q such that PAQ is in normal form.
Solution:
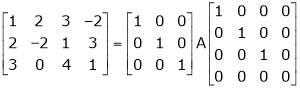
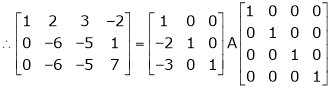
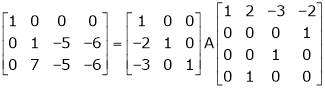
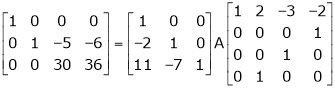
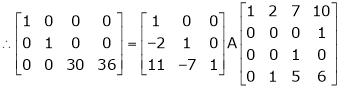
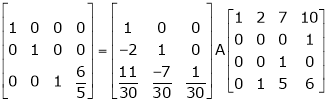
Here A is a square matrix of order 3 x 3. Hence we write,
A = I3 A.I3
i.e. 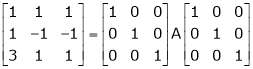

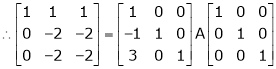
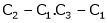
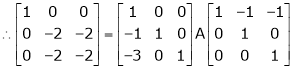


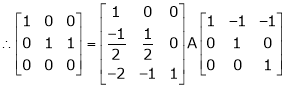

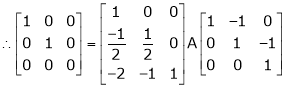
i.e. 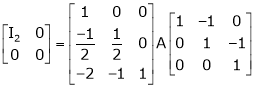

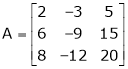
Example 2
Find a non – singular matrices p and Q such that P A Q is in normal form where
Solution:
Here A is a matrix of order 3 x 4. Hence we write A as,

i.e.








i.e. 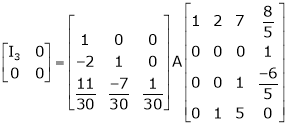

Reference Books
1. M.D. Wier, et. Al., Thomas’ Calculus, 11th Ed., Pearson Education, 2008
2. Stewart James, Calculus Early Transcendental, 5th Ed., Thomson India, 2007
3. Wylie & Barrett, Advanced Engineering Mathematics, Mc graw Hill pub.
4. Greenberg, M.D., Advanced Engineering Mathematics, 2nd ed., Pearson




