Unit - 2
Propagation Models for Wireless Networks
The wireless communication system possesses several challenges for the reliable and a high-speed communication. It is not receptive of noise channel and other channel hindrance, but these obstacle changes with time in unforeseeable ways due to user movement. We will characterize in detail the variation in the received signal power over the distance due to path loss and shadowing.
Path loss models describe the signal attenuation between a transmitter and receiver antenna as a function of propagation distance and other parameters which is caused by the dissipation of the power radiated by the transmitter as well as effects of the propagation channel. Shadowing is caused by obstruction between the transmitter and the receiver that attenuate the signal power through absorption, reflection, scattering, and diffraction.
A very important practical issue is to test and validate the ability of the “smart” antenna array to meet performance requirements. For this purpose, a channel model is needed to take into account the temporal and spatial characteristics of radio propagation.
The wireless signal proliferates in space, based on the rule of physics. An electromagnetic Radio Frequency (RF) signal which proceed in a medium suffers an attenuation (path loss) based on the nature of the medium. In addition, the signal experiences objects and gets reflected, refracted, diffracted, and scattered. The cumulative effect results in the signal getting absorbed, signal travel across multiple paths, signal’s frequency being shifted due to relative motion between the source and objects (Doppler Effect), thus are getting modified in a sufficient way. It is clear that the radio frequency signal is a space-time-frequency signal.
CHARACTERISTICS OF WIRELESS CHANNEL
The main characteristics of wireless communication channel are as follows:
1. Path loss 2. Fading and shadowing 3. Interference 4. Doppler shift
Key takeaway
Characteristics of wireless communication system, path loss, fading, interference, types of propagation models-outdoor & indoor propagation model
This model includes not just one path, but also another path that reflects off of the ground, as shown in Figure below (in Rappaport). The model isn’t hard to develop, and provides an important theoretical underpinning to the multiple breakpoint model. Remember, powers of multipath DON’T add together. Only voltages or field strength of multipath actually add together. The voltage on the antenna is proportional to the electric field at the antenna position. So, let’s talk about adding electric fields.
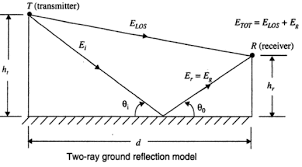
Fig 1 TX and RX are separated on the ground by d, but are at heights ht and hr respectively
Direct Path
Recall that the electric field magnitude decays as 1/d in free space. So, similar to how we wrote the received power with a reference distance d0, we write the E-field strength as the E-field strength at a reference distance, multiplied by d0/d′, for a path (distance of travel for waves) length d ′. Also, assume the signal is a simple sinusoid at the carrier frequency, fc. So,
E (d, t) = E0  ))
))
For the LOS path, given a distance along the ground of d, antenna heights ht and hr at the TX and RX, respectively, the
d ′ = 
ELOS = E0 ))
))
Reflected Path
Two things change for the reflected path compared to the LOS path:
Eg = ΓE0  ))
))
Let’s assume that d is very long compared to the antenna heights. So, the angle of incidence is approximately 0. In this case the reflection coefficient (assume perpendicular polarization) is -1. Then,
Eg = - E0  ))
))
Total Two-Ray E-Field
We are interested in the magnitude of the total E-field, ETOT = ELOS + Eg, that is, the quantity that multiplies the cos(2πfct) term. Using trig identities, and this approximation
∆ =  ≈
≈ 
|ETOT | ≈ 2E0  sin (
sin ( )
)
This means that the power decays as 1/d4! See Figure
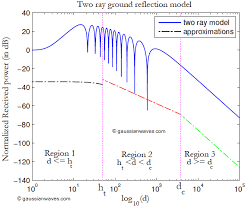
Fig 2 Received power as a function of log distance in two-ray model
Key takeaway
Remember, powers of multipath DON’T add together. Only voltages or field strength of multipath actually add together.
It is well known that obstacles directly affect propagation of wireless signals. We might tend to think that power received by a mobile receptor comes from waves crossing through obstacles along a propagation path but reality is all power comes from reflected waves which is commonly called multipath reflection phenomenon. Despite the fact of multipath reflection phenomenon, there is a relation between received power and the number of obstacles in the propagation path. When the number of obstacles between a transmitter and a receiver increases, signal power perceived by a receptor decreases as a result. Certainly, obstacles play a big role in signal propagation modeling and it is necessary to include them as part of the analysis.
Lee's microcell propagation model is a power prediction technique that includes the effect of obstacles on propagation analysis. It is widely applied to mobile cellular systems with cell coverage radius less than 1 Km. Lee's methodology is very easy to implement and provides faster and more accurate results in terms of signal power prediction when compared to other generic propagation models. In fact, it was recommended by the International Telecommunications Union (ITU) and the European Conference of Postal and Telecommunications Administrations (CEPT) to obtain the local mean values of the received signal along a route. It was developed for a Rayleigh distribution in the ultra-high frequency (UHF) band. We think it can be used in complex scenarios and moreover it is the model the Telecommunications operators prefer to use in practice.
We did some measurements in the same scenario in response to an official request of Ecuadorian Telecommunication operators. For these reasons we evaluated the empirical measurements for validating the Lee’s model. The original Lee microcell model considered terrain and buildings as obstacles located at urban and semi urban environments. The model presented a power prediction equation and a methodology for detailed analysis of building obstruction using the help of empiric characteristics curves based upon field measurements. It also addressed some interesting and useful concepts such as block building density, obstruction distance and equivalent obstruction distance.
Lee's microcell model is presented in the following equation.
Pr(A) = Pt – Llos (dA, h1) – Lb(B)
Where Pr(A) is received power at a random A point within the coverage area, Pt is the Effective Radiated Power (ERP), Llos(dA) is line of sight loss at dA distance from the source. The last parameter is Lb that represents any loss mainly associated to buildings obstruction along the propagation path and it normally depends on the building obstruction distance denoted as B. This model was enhanced in order to be applied to other kind of obstacles. Lee considered different databases for characterizing streets in urban zones and the extension of the basic model for macrocells.
Many have extended this model to consider complex scenarios. In the generalization of Lee’s model to any propagation channel and frequency band was presented. It also described the methodology to obtain the parameters involved in the model. The Lee’s model or extensions of this model have been also applied to several scenarios recently. A good point of start to understand Lee's model and an example of application is shown. The authors explain the model and apply it to a non-homogeneous environment considering the environment divided in different variable density buildings (dense urban, urban, suburban...).
They apply the model after deriving from field strength measurements the 1-mile intercept and the path loss slope parameters for each type of environment. The authors consider that building a database with pairs of known intercept and slope parameters let apply the Lee's model to different environments to perform propagation predictions. The work is also a case study in the city of Amman. With experimentation we tried to verify if Lee's model will behave well at the 1800 MHz band at our complex scenario.
Practical experimentation is not made as we propose in our contribution. In the application of Lee’s model at Nigeria is compared with others models for Code Division Multiple Access (CDMA) system operating in 800MHz UHF. As the conclusion of this comparison, the authors chose Hata’s model for their target environment.
Key takeaway
Lee's microcell model is presented in the following equation.
Pr(A) = Pt – Llos (dA, h1) – Lb(B)
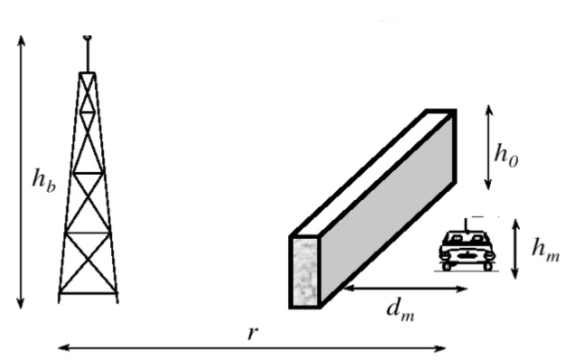
Fig 3 Macro-cell Geometry
A microcell model is used by system designers to place the base station. They are simple, dependent on distance from base station only and are based on measurements which empirical model.
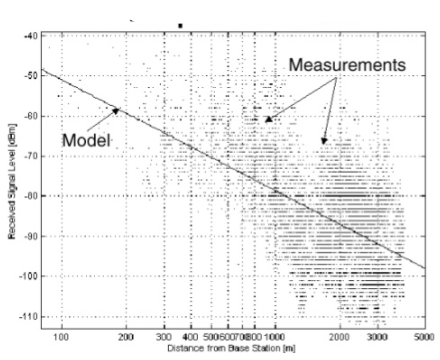
Fig 4 Empirical Model
Simplest form of an empirical path loss model

L(db) = 10nlogr + K
K = 10logk
PR and PT are the effective isotropic transmitted and predicted isotropic received power, K and n are constants of the model. Measurements taken in urban and suburban area usually find a path loss exponent close to 4, but with losses higher than predicted.
L(dB) = 10nlogr+K
L(dB) = 10nlog(r/rref) + Lref
Represented by clutter factor
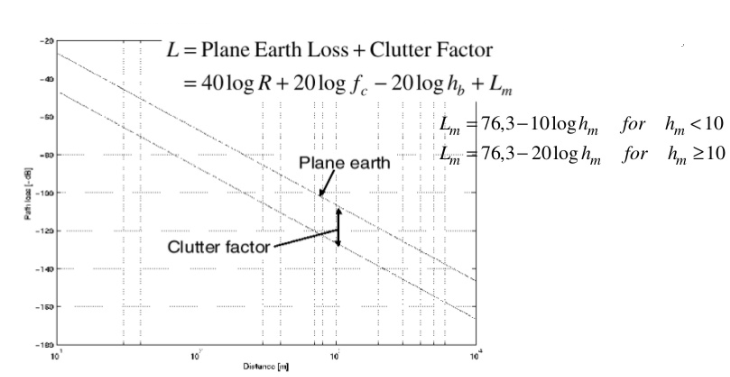
Fig 5 Clutter Factor Model
Fully empirical model, based on an extensive series of measurements made around Tokyo city between 200MHz and 2GHz. Predictions are based on a series of graphs; the most important ones have been approximated in a set of formulae by Hata discussed in above section.
Lee model is a power law model with parameters taken from measurements in a number of locations.
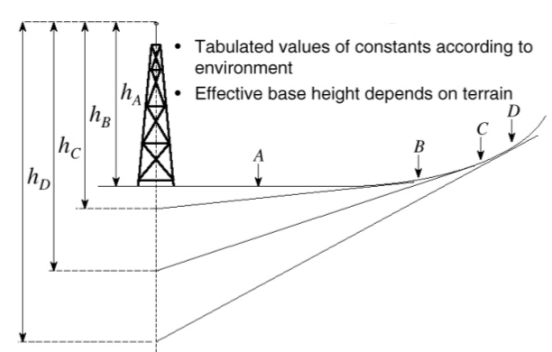
Fig 6 Lee model
The model equations are described as




Limitations of the empirical model are
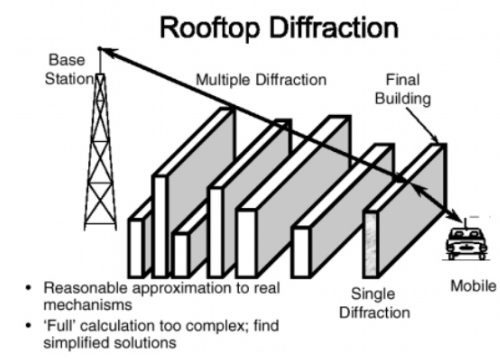
Fig 7 Roof top diffraction
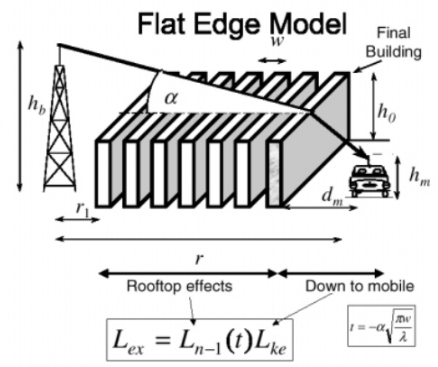
Fig 8 Flat edge model
Key takeaway
Limitations of the empirical model are
Log-normal Shadowing
• Statistical model for variations in the received signal amplitude due to blockage.
• The received signal power with the combined effect of path loss (power falloff model) and shadowing is, in dB, given by
Pr(dB) = Pt(dB) + 10 log10 K − 10γ log10(d/dr) − ψ(dB)
Empirical measurements support the log-normal distribution for ψ:

where ξ = 10/ ln 10, µψdB is the mean of ψdB = 10 log10 ψ in dB and σψdB is the standard deviation of ψdB, also in dB.
• With a change of variables, setting ψdB = 10 log10 ψ, we get

This empirical distribution can be justified by a CLT argument.
• The autocorrelation based on measurements follows an autoregressive model:

where Xc is the decorrelation distance, which depends on the environment
Combined Path Loss and Shadowing
• Linear Model:

• dB Model

• Average shadowing attenuation: when KdB = 10 log10 K captures average dB shadowing, µψdB = 0, otherwise µψdB > 0 since shadowing causes positive attenuation.
Outage Probability under Path Loss and Shadowing
• With path loss and shadowing, the received power at any given distance between transmitter and receiver is random.
• Leads to a non-circular coverage area around the transmitter, i.e., non-circular contours of constant power above which performance (e.g., in WiFi or cellular) is acceptable.
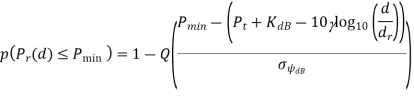
• Outage probability Pout (Pmin, d) is defined as the probability that the received power at a given distance d, Pr(d), is below a target Pmin: Pout (Pmin, d) = p(Pr(d) < Pmin). • For the simplified path loss model and log normal shadowing this becomes
Model Parameters from Empirical Data:
• Constant KdB typically obtained from measurement at distance d0.
• Power falloff exponent γ obtained by
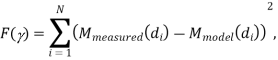
where Mmeasured (di) is the ith path loss measurement at distance di and Mmodel(di) = KdB − 10γ log10(di). The minimizing γ is obtained by differentiating with respect to γ, setting this derivative to zero, and solving for γ.
• The resulting path loss model will include average attenuation, so µψdB = 0.
• Can also solve simultaneously for (KdB, γ) via least squares fit of both parameters to the data. Using the line equation for each data point yi that yi = mxi + KdB for m = −10γ and xi = log10(di), the error of the straight-line fit is

The shadowing variance σ 2 ψdB is obtained by determining the MSE of the data versus the empirical path loss model with the minimizing γ = γ0:

Let’s transition to the real world, where we exist. There are other effects besides radiation, including attenuation (transmission), reflection, diffraction, scattering, etc. We will discuss each of these in upcoming lectures. For now, suffice it to say that many signals arrive at the receiver, but with less power than would be indicated by the Friis equation. The received power varies strongly (5-25 dB) even for small changes in antenna position, center frequency, and time.
But there is a large effect caused when the distance (a.k.a. path length) increases by orders of magnitude. This large effect we call large scale path loss. It is analogous to Lp, but doesn’t necessarily take the same form. We will re-write Lp as a function of distance in one of two ways:
Pr = Pt Gt Gr ( 10−αd/10
10−αd/10
This works well in some conditions, for example, at 60 GHz, at which oxygen molecules absorb RF radiation, or due to rain at 30 GHz.
2. Power decay: Lp will be proportional to 1/dn, for some path loss exponent n. In free space, it was proportional to 1/d2, so this just lets n adjust to the particular environment. Typically, n ranges between 1.6 and 6, according to Rappaport. From my experience, I’ve seen n between 1.7 and 5.
Log Distance Path Loss
This is synonymous with what I call “power decay” above. Actually, it is the simplest of the models, and makes a big step towards better representation of actual large-scale path loss. In the log-distance path loss model, we can simply write the received power as a
Pr(dBm) = Π0(dBm) − 10n log10 ( )
)
where Π0(dBm) is still given by the Friis equation, but now the Lp(dB) term has changed to include a factor 10n instead of 20. Typically, d0 is taken to be on the edge of near-field and far-field, say 1 meter for indoor propagation, and 10-100m for outdoor propagation. We mentioned that we can find the parameter Π0(dBm) from measurements. We can also find the parameter n from measurements
Multiple Breakpoint Model
Empirically measurement studies have shown that the slope of the Lp vs. distance curve changes after a certain distance. You can see this effect as for, d > 20 meters; the path gains at d = 50 meters are all lower than the model, and one can see the slope changing to an n higher than 2.98. Regardless, we can model the path loss as experiencing more than one slope in different segments of the log d axis.
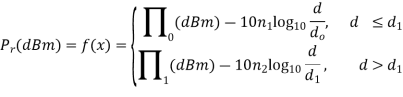
where Π0(dBm) is still the Friis received power at a distance d0, and Π1(dBm) is the received power (given by the first line of the equation) at distance d1, and d0 < d1. Typically, the slope of the path loss increases, i.e., n2 > n1.
Key takeaway
But there is a large effect caused when the distance (a.k.a. path length) increases by orders of magnitude. This large effect we call large scale path loss.
Multipath causes three major things in wireless communication
The input signal is given by

The received signal can be written as
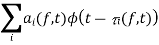
where ai (f, t) and  I (f, t) are respectively the overall attenuation and propagation delay at time t from the transmitter to the receiver on path i. The overall attenuation is simply the product of the attenuation factors due to the antenna pattern of the transmitter and the receiver, the nature of the reflector, as well as a factor that is a function of the distance from the transmitting antenna to the reflector and from the reflector to the receive antenna. We have described the channel effect at a particular frequency f.
I (f, t) are respectively the overall attenuation and propagation delay at time t from the transmitter to the receiver on path i. The overall attenuation is simply the product of the attenuation factors due to the antenna pattern of the transmitter and the receiver, the nature of the reflector, as well as a factor that is a function of the distance from the transmitting antenna to the reflector and from the reflector to the receive antenna. We have described the channel effect at a particular frequency f.
If we further assume that the ai (f, t) and the  I (f, t) do not depend on the frequency f, then we can use the principle of superposition to generalize the above input/output relation to an arbitrary input x(t) with non-zero bandwidth
I (f, t) do not depend on the frequency f, then we can use the principle of superposition to generalize the above input/output relation to an arbitrary input x(t) with non-zero bandwidth
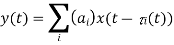
In practice the attenuations and the propagation delays are usually slowly varying functions of frequency. These variations follow from the time-varying path lengths and also from frequency-dependent antenna gains. However, we are primarily interested in transmitting over bands that are narrow relative to the carrier frequency, and over such ranges we can omit this frequency dependence. It should however be noted that although the individual attenuations and delays are assumed to be independent of the frequency, the overall channel response can still vary with frequency due to the fact that different paths have different delays.
For the example of a perfectly reflecting wall


where the first expression is for the direct path and the second for the reflected path. The term here is to account for possible phase changes at the transmitter, reflector, and receiver. For the example here, there is a phase reversal at the reflector so we take
here is to account for possible phase changes at the transmitter, reflector, and receiver. For the example here, there is a phase reversal at the reflector so we take 1 =0 and
1 =0 and  2 =π.
2 =π.
Since the channel is linear, it can be described by the response h ( ,t) at time t to an impulse transmitted at time t-
,t) at time t to an impulse transmitted at time t- . In terms of h (
. In terms of h ( ,t), the input/output relationship is given by
,t), the input/output relationship is given by
we see that the impulse response for the fading multipath channel is
This expression is really quite nice. It says that the effect of mobile users, arbitrarily moving reflectors and absorbers, and all of the complexities of solving Maxwell’s equations, finally reduce to an input/output relation between transmit and receive antennas which is simply represented as the impulse response of a linear time-varying channel filter.
The effect of the Doppler shift is not immediately evident in this representation.  i’(t) = vi/c where vi is the velocity with which the ith path length is increasing. Thus, the Doppler shift on the ith path is -f
i’(t) = vi/c where vi is the velocity with which the ith path length is increasing. Thus, the Doppler shift on the ith path is -f i’(t). In the special case when the transmitter, receiver and the environment are all stationary, the attenuations ai(t) and propagation delays
i’(t). In the special case when the transmitter, receiver and the environment are all stationary, the attenuations ai(t) and propagation delays  i(t) do not depend on time t, and we have the usual linear time-invariant channel with an impulse response
i(t) do not depend on time t, and we have the usual linear time-invariant channel with an impulse response
For the time-varying impulse response h ( ,t), we can define a time-varying frequency response
,t), we can define a time-varying frequency response

Key takeaway
In the special case when the channel is time-invariant, this reduces to the usual frequency response. One way of interpreting H (f; t) is to think of the system as a slowly varying function of t with a frequency response H (f; t) at each fixed time t. Corresponding, h ( ,t) can be thought of as the impulse response of the system at a fixed time t. This is a legitimate and useful way of thinking about many multipath fading channels, as the time-scale at which the channel varies is typically much longer than the delay spread (i.e., the amount of memory) of the impulse response at a fixed time.
,t) can be thought of as the impulse response of the system at a fixed time t. This is a legitimate and useful way of thinking about many multipath fading channels, as the time-scale at which the channel varies is typically much longer than the delay spread (i.e., the amount of memory) of the impulse response at a fixed time.
Another important general parameter of a wireless system is the multipath delay spread, Td, defined as the difference in propagation time between The Doppler spread can in principle be different for different taps.
This is defined as a function of t, but we regard it as an order of magnitude quantity, like the time coherence and Doppler spread. If a cell or LAN has a linear extent of a few kilometers or less, it is very unlikely to have path lengths that differ by more than 300 to 600 meters. This corresponds to path delays of one or two microseconds.
As cells become smaller due to increased cellular usage, Td also shrinks. As was already mentioned, typical wireless channels are under spread, which means that the delay spread Td is much smaller than the coherence time Tc. The bandwidths of cellular systems range between several hundred kilohertz and several megahertz, and thus, for the above multipath delay spread values, all the path delays lie within the peaks of two or three sinc functions; more often, they lie within a single peak. Adding a few extra taps to each channel filter because of the slow decay of the sinc function, we see that cellular channels can be represented with at most four or five channel filter taps.
On the other hand, there is a recent interest in ultra-wideband (UWB) communication, operating from 3.1 to 10.6 GHz. These channels can have up to a few hundred taps. When we study modulation and detection for cellular systems, we shall see that the receiver must estimate the values of these channel filter taps. The taps are estimated via transmitted and received waveforms, and thus the receiver makes no explicit use of (and usually does not have) any information about individual path delays and path strengths.
This is why we have not studied the details of propagation over multiple paths with complicated types of reflection mechanisms. All we really need is the aggregate values of gross physical mechanisms such as Doppler spread, coherence time, and multipath spread. The delay spread of the channel dictates its frequency coherence. Wireless channels change both in time and frequency. The time coherence shows us how quickly the channel changes in time, and similarly, the frequency coherence shows how quickly it changes in frequency.
We first understood about channels changing in time, and correspondingly about the duration of fades, by studying the simple example of a direct path and a single reflected path. That same example also showed us how channels change with frequency. We can see this in terms of the frequency response as well. Recall that the frequency response at time t is
The contribution due to a particular path has a phase linear in f. For multiple paths, there is a differential phase 2πf( i(t)-
i(t)- k(t)). This differential phase causes selective fading in frequency. This says that Er (f, t) changes 200MHz is frequency-selective, and the impulse response has many taps. (b) The spectral content of the same channel. (c) The same channel over 40MHz is flatter, and has for fewer taps. (d) The spectral contents of the same channel, limited to 40MHz bandwidth. At larger bandwidths, the same physical paths are resolved into a finer resolution. significantly, not only when t changes by 1/(4Ds), but also when f changes by 1/(2Td). This argument extends to an arbitrary number of paths, so the coherence bandwidth, Wc, is given by
k(t)). This differential phase causes selective fading in frequency. This says that Er (f, t) changes 200MHz is frequency-selective, and the impulse response has many taps. (b) The spectral content of the same channel. (c) The same channel over 40MHz is flatter, and has for fewer taps. (d) The spectral contents of the same channel, limited to 40MHz bandwidth. At larger bandwidths, the same physical paths are resolved into a finer resolution. significantly, not only when t changes by 1/(4Ds), but also when f changes by 1/(2Td). This argument extends to an arbitrary number of paths, so the coherence bandwidth, Wc, is given by
Wc = 1/2Td
When the bandwidth of the input is considerably less than Wc, the channel is usually referred to as flat fading. In this case, the delay spread Td is much less than the symbol time 1/W, and a single channel filter tap is sufficient to represent the channel. When the bandwidth is much larger than Wc, the channel is said to be frequency-selective, and it has to be represented by multiple taps.
Key takeaway
Key channel parameters and time –scales | Symbol | Representative values |
Carrier frequency |  |  |
Communication bandwidth |  |  |
Distance between transmitter and receiver |  |  |
Velocity of mobile |  |  |
Doppler shift for a path |  |  |
Doppler spread of paths corresponding to a tap |  |  |
Time-scale for change of path amplitude |  |  |
Time-scale for a change of path phase |  |  |
Time-scale for a path no move over a tap |  |  |
Coherence spread |  |  |
Delay spread |  |  |
Coherence bandwidth |  |  |
An important channel parameter is the time-scale of the variation of the channel
Let us look at this expression term by term. The significant changes in ai occur over periods of seconds or more. Significant changes in the phase of the ith path occur at intervals of 1/(4Di) where Di = fc i’(t) is the Doppler shift for that path. When the different paths contributing to the lth tap have different Doppler shifts, the magnitude of hl[m] changes significantly. This is happening at the time-scale inversely proportional to the largest difference between the Doppler shifts, the Doppler spread Ds:
i’(t) is the Doppler shift for that path. When the different paths contributing to the lth tap have different Doppler shifts, the magnitude of hl[m] changes significantly. This is happening at the time-scale inversely proportional to the largest difference between the Doppler shifts, the Doppler spread Ds:

where the maximum is taken over all the paths that contribute significantly to a tap. Typical intervals for such changes are on the order of 10 ms. Finally, changes in the sinc term (of above equation) due to the time variation of each  i(t) are proportional to the bandwidth, whereas those in the phase are proportional to the carrier frequency, which is typically much larger. Essentially, it takes much longer for a path to move from one tap to the next than for its phase to change significantly. Thus, the fastest changes in the filter taps occur because of the phase changes, and these are significant over delay changes of 1/(4Ds).
i(t) are proportional to the bandwidth, whereas those in the phase are proportional to the carrier frequency, which is typically much larger. Essentially, it takes much longer for a path to move from one tap to the next than for its phase to change significantly. Thus, the fastest changes in the filter taps occur because of the phase changes, and these are significant over delay changes of 1/(4Ds).
The coherence time Tc of a wireless channel is defined (in an order of magnitude sense) as the interval over which hl[m] changes significantly as a function of m. What we have found, then, is the important relation

This is a somewhat imprecise relation, since the largest Doppler shifts may belong to paths that are too weak to make a difference. We could also view a phase change of π/4 to be significant, and thus replace the factor of 4 above by 8. Many people instead replace the factor of 4 by 1. The important thing is to recognize that the major effect in determining time coherence is the Doppler spread, and that the relationship is reciprocal; the larger the Doppler spread, the smaller the time coherence. In the wireless communication literature, channels are often categorized as fast fading and slow fading, but there is little consensus on what these terms mean.
Key takeaway
A channel fast fading if the coherence time Tc is much shorter than the delay requirement of the application, and slow fading if Tc is longer. The operational significance of this definition is that, in a fast-fading channel, one can transmit the coded symbols over multiple fades of the channel, while in a slow fading channel, one cannot. Thus, whether a channel is fast or slow fading depends not only on the environment but also on the application; voice, for example, typically has a short delay requirement of less than 100 ms, while some types of data applications can have a laxer delay requirement.
So far, we’ve talked about fading without movement. A static link has a fading loss. If you change centre frequency on a static link, you see frequency-dependent fading. But for a link with a static centre frequency but with TX and/or RX in motion,
(1) the fading loss changes over time, and
(2) the frequency shift,
The complex baseband received voltage is given as
VTOT = 
VTOT = 
The second expression is rewritten with di = cτi, where di is the distance multipath component i travels. This showed us the frequency dependence of the fading channel gain, which is 20 log10 |VT OT |. Now, let’s talk about what happens when the receiver is moving. Motion causes the time delays to change, because the distance that the wave must travel is becoming either shorter or longer.
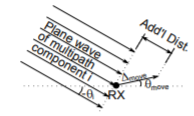
Fig 9: The plane wave of a multipath component arrives at the receiver (•).
Let the angle of arrival of component i be θi, like the one shown in Figure. (Actually, consider that multipath components will arrive with different θi.) Let’s assume I move ∆move meters in the direction θmove. We assume that these waves are effectively plane waves in the local (small) area near the antenna. Thus, the only thing that changes when I move the antenna to a new position is that the wave is lengthened (or shortened) by a factor of the distance I moved, multiplied by the cosine of the angle in between θi and my direction of motion θmove. After movement of ∆move meters in the direction θmove, VTOT becomes:
VTOT = 
One Component
First, keep things simple by considering only one arriving multipath.
VTOT = 
Let’s consider when the antenna is moving at a constant velocity v meters per second. Then, at time t, we have ∆move = vt. So,
VTOT = 
There’s a lot going on here, but we actually have not just a phase, but a complex sinusoid of
fd = - v  /
/
This is called the Doppler shift. When one sends a frequency fc, the received frequency of the signal has shifted up (or down, if fd is negative) by this factor.
Example:
Q1) What are the maximum Doppler frequencies for a mobile in a vehicle on I-15, at 850 and 1950 MHz?
Solution: Given 1 mile per hour = 0.447 meters per second, let’s say a maximum speed of 80 miles/hr, which gives v = 35.8 m/s. Then fm = 101 Hz, or 232 Hz, for 850 or 1950 MHz, respectively
Many Components
Now, each component contributes a complex sinusoid of frequency
fd = - v  /
/
The effect is frequency spreading. That is, for each frequency that is sent, many frequencies are received. In the frequency domain, the frequency content of the signal (say, S(ω)) is convolved with the Doppler spectrum VTOT (ω)). If there are diffuse multipath coming equally from all directions, then the power spectrum of VTOT can be determined to be:
S(f) = 
Key takeaway
fd = - v  /
/
This is called the Doppler shift
Rayleigh Channel
The Rayleigh fading occurs due to multipath reception. When there are N number of scattered waves which are received at the mobile antenna than the power received by the moving antenna is a random variable. The phasor representation is shown below.
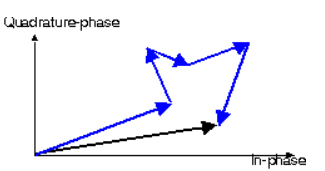
Fig 10 Phasor for Rayleigh Fading
Let Cn be the amplitude of nth reflected wave. Then the transmitted signal is
V(t) = cos(wct+ )
)
The signal received will be given as
r(t) = 
The quadrature phase component can be given as
Q(t) = 
Rician Fading
There is a dominant component present in this model. The component which is dominant can be a LoS (line of sight). The antenna also receives many reflected and scattered waves. The phasor sum of two or more dominant signals can also be LoS. The phasor for this is shown below.
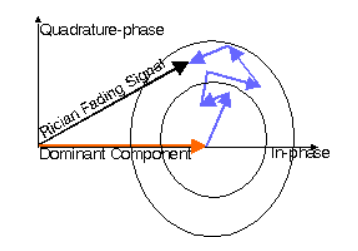
Fig 11 Phasor for Rician Fading Signal
A sinusoidal transmitted carrier is taken with narrowband propagation channel
S(t) = cos wct
The received signal from Rician path is given by
V(t) = C cos wct+
Where C= amplitude of LoS
 = amplitude of nth reflected wave
= amplitude of nth reflected wave
 = phase of nth reflected wave
= phase of nth reflected wave
The ratio of signal power in dominant component to the scattered power is called as Rician factor denoted by k.
Nakagami Fading Channel
This model matches the empirical results for short wave ionospheric propagation. When Rayleigh fading signal combines with k branch maximum ratio combination the Nakagami fading is found. When there is large delay time spread for multipath scattering Nakagami fading occurs.
This fading occurs with cluster of reflected waves. The phase of individual reflected waves is different for one cluster. The envelop of each cluster is Rayleigh distributed. There can be interference when the bit time of signal is more than delay time.
The Nakagami model is equivalent to the Rician model. But it is not exactly same in all cases. This approximation holds good for the body of probability density
Ocumura and Hata Path Loss
This model has the information which is graphical based on the Okumara model. This model is used to predict the path loss in urban areas. This mode mainly has the waves which are reflected, diffracted and scattered from the obstacles. The parameters for this model are
For urban area the model is as below
LU = 69.55+26.16 logf – 13.28loghB- CH + (44.9-6.55loghB) logd
The area for which antenna height is >10m
CH = 0.8 + (1.1 logf – 0.7) hM – 1.56logf
For Large Cities
CH = 8.29(log(1.54hM))2 – 1.1 for 150MHz<f<200MHz
= 3.2(log(11.75hM))2 – 4.97 for 200MHz<f<1500MHz
LU= Path loss in Urban Areas
hB= Height of base station antenna in meters (m)
hM= Height of mobile station antenna in meters (m)
f= Frequency of Transmission in megahertz (MHz).
CH= Antenna height correction factor
The Hata model equation for suburban areas is given by
LSU = LU – 2(log )2 – 5.4
)2 – 5.4
LSU = Path loss in suburban areas in decibels (dB)
LU = Average Path loss in urban areas in decibels (dB)
f = Frequency of Transmission in megahertz (MHz).
The Hata model for areas with less obstruction is
Lo = LU – 4.78(logf)2 + 18.33logf – 40.94
LO = Path loss in open area. Unit: (dB)
LU = Path loss in urban area. Unit: decibel (dB)
f = Frequency of transmission. Unit: (MHz)
Key takeaway
If antenna is kept still or its speed is zero than there is no fading due to no fluctuations in signals.
Rayleigh fading is for C=0 function but not for its tail.
The Nakagami distributed signal amplitude is obtained when the sum of multiple independent signals is Rayleigh distributed.
The huge development of the mobile phones has grown up rapidly in the last years, frequency bands have come up and the market is asking for smaller mobile phones with more services which give the user the ability to use the mobile phone with good signal performance and helps to use the mobile phone around the whole world. On top of that it is important to reduce the risks affecting in the human body because of the antenna radiation.
In the past the mobile phone was so heavy, big and had external antenna on the top of the phone which effect badly on the human head and most of the signal radiate is reflected and absorbed by the human head which lead to bad efficiency. Nowadays the internal antenna has been using instead of the external antenna the main reason of that is the internal antenna has a good relation with SAR rate, on the other hand the size of the phone became smaller.
Recently there are many types of the internal antennas for example PIFA antenna (Planar Inverted- F Antenna), fractal antenna and monopole antenna. Those kinds of antennas can cover a single band, dual band, wideband and multiband based on the design of the antenna.
Antennas
In the first generation 1G of mobile system, the system was operating at 800 MHz and as known it was analog. The first antenna handset for one quarter of wavelength has length about 9.4 cm, and it was one antenna only. The first mobile phone was Motorola DynaTAC8000X with type 3 antenna is sleeve dipole which is not use any more in modern design of mobile phones antennas, however it still is used in different wireless LAN access points. Sleeve dipole antenna has an efficient performance; the length of it is about half the wave length at its frequency. So, at 850 MHz the antenna should be 176mm. With the improvement on mobile phone and due to the dramatic minimizing size of the mobile phone, there were no needs for a sleeve dipole to be proportional to the cellular phone.
In 1990s 2G launched which offered new services such as text message, and it is operated at GSM 900 MHz, where later on at 1800 MHz unlikely 1G, the second- generation handset antenna has two antennas monopole and helix with only single band supporting.
In modern mobile phone, we can conclude a summary of the considerations in design process as following:
The requirement of multiband and built–in antenna.
The requirement of small size antenna due to small size mobile terminals, for example RFID units (Radio-frequency identification).
The requirement of function antennas such as adaptive antennas and MIMO for transmission high data rate. Printed antenna has been used in mobile terminals; also Printed antennas have the smallest dimensions comparing with other installed small antennas. Chip antennas or a printed antenna consists of dielectric material and a ground plane which is a part of the antenna. Chip antennas offer a high gain, appropriate radiation pattern, and high efficiency.
Antennas Radiation pattern
Radiation pattern can be described by power radiated through the antenna, which depends on the direction, and it can be represented as graphical or mathematical function of the radiation properties. There are two common types of antenna pattern, the first one is a power pattern and the second is field pattern, the first type is considering the power radiated and the position of the spherical coordinate and the second type which depend on the field if we have electrical field or magnetic field with the position of spherical coordinate. The field region of the antenna pattern can be dived to three regions. The first region is Reactive Near Field Region which is the closest region to the antenna so it gives possibility to control the energy and standing wave. The second region is located between the receiver near field region and the far field region where control the radiation field. The last region is the far field region which has a far distance of the antenna.
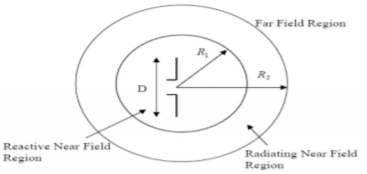
Fig 12 The radiation pattern and field region
Directivity
Directivity is one of the antenna parameters that guide us to measure the direction of the radiation pattern, the directivity helps us to determine the efficiency of the antenna, directivity of isotropic antenna equal to 1 (0 dB). The directivity can be calculated by determining the maximum value of the magnitude of the radiation pattern which is defined by F (θ, ϕ) and the average power of all the direction which is equal to 1 so, the formula of calculating the directivity it can be written as:
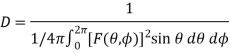
𝜃 = The angle between the z-axis and the vector from the origin to the point
𝜙 = The angle between the x-axis and the projection onto the x-y plane.
Mobile phone antenna should have a low directivity, because is not useful to use an antenna with high directivity, that is the received signal it can be from different directions. On the other hand, the base station needs a high directivity.
Polarization
One of the characteristics for any types of antennas is the direction of the electrical field vector of the electromagnetic wave. The polarizations of electromagnetic wave depend on the electrical field, which is perpendicular with the magnetic field.
The polarization of antennas can be classified in three different types based on electrical field 1- Linear polarization: as shown below the electrical field travels with the same direction of the plane wave. There are two types of linear polarization:
Vertical polarization: the electrical field travelling orthogonally to the y-axis and the magnetic field is travelling horizontally to x-axis.
Horizontal polarization: the electrical field is travelling horizontally to the x-axis and the magnetic field is travelling orthogonally to the y-axis.
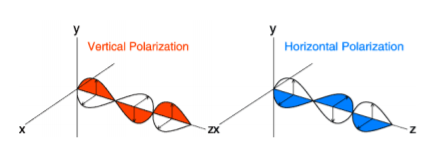
Fig 13 Polarisation
Circular polarization: The electrical field travels circularly as shown below. It can be divided to two types regarding to direction of the circle:
Right Circular polarization: the direction of the circle is clockwise.
Left circular polarization: the direction of the circle is anti-clockwise.
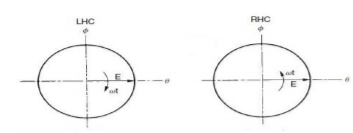
Fig 14 Circular Polarisation
Elliptical polarization: The electrical field travels with an elliptical shape based on the direction of the electrical field figure below shows it can be divided to two types:
Right elliptical polarization which is has direction with clockwise.
Left elliptical polarization which has direction anti-clockwise.
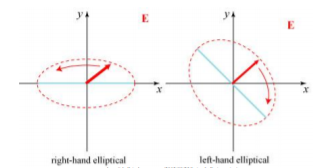
Fig 15 Elliptical Polarisation
Impedance
The impedance of the antenna mainly depends on the input voltage and current for the power losses equal to the power transmission of the antenna. The benefits of knowing the input impedance it is lead you that to choose the suitable transmission line. The impedance of an antenna ZA must be matched with its impedance transmission line ZS (feeder). Otherwise, there will be amount of a reflection wave back to the signal source. To have maximum power at the antenna from source as shown in figure ZS should be equal to ZA
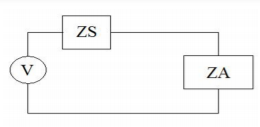
Fig 16 Equivalent circuit of an antenna and the transmission line
Antenna gain
One of the antenna properties to describe the value of the power transmission to the peak radiation direction. The efficiency of the antenna always relates with the antenna gain so if the efficiency is perfect 100% that’s mean the gain and the directivity are equal to each other, it can be describe by the following formula:
𝑮 = 𝜺𝑹D
Antenna efficiency
The relation between the input power to the antenna and the dissipated power which is the losses power within antenna, regarding to the relation between the power radiate and the power input the efficiency of the antenna can be written by the following formula:
𝜺𝑹 = Pr/Pin
Antenna Beamwidth (θ)
The angle between the two points of the half power of the radiation pattern, the beam width could be clarified as the half power, the directivity become high if the beamwidth very small. The beamwidth is found by determining the two points with 3db as showing in figure
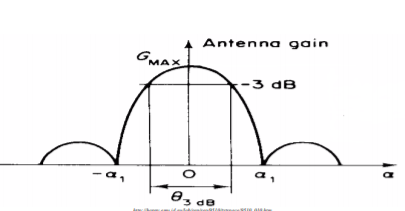
Fig 17 Half Power Beamwidth
Effective area
To calculate the transmission power (𝑃𝑡) and determine how much power has been lost due to the plane wave, regarding to the relation between the power density (P) and the effective area (𝐴𝑒) the following formula can be written as:
𝑷𝒕 = 𝑷𝑨e
To calculate the effective area, we should consider the relation between the effective area and the antenna gain the formula can be written as
Ae = (𝝀𝟐 /𝟒𝝅) G
Bandwidth
One of the other important parameters is bandwidth which determines the range of the frequencies where the antenna is operating. The percentage of the bandwidth can be calculated as following
Bandwidth = (fmax – fmin) /fcenter x 100
VSWR
Voltage standing wave ration or 𝑆11 which describe the reflection power coefficient or the return losses of the antenna, the VSWR can be defined by the following formula:
VSWR = 
 = Reflection Coefficient
= Reflection Coefficient
Antenna Types
Dipole Antenna
Most commonly used antenna in radio communication due to its simplicity. It has two rods or poles which are identical conductive elements, and fed by a signal source or feed energy.
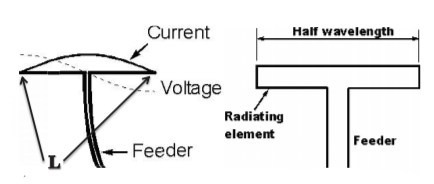
Fig 18 Half wave dipole antenna
Monopole antenna
Unlikely dipole antenna Monopole antenna is an antenna which consists of a one straight rod conductor, and is installed over a ground plane (conductive surface) as seen in figure. Monopole antennas are fed at lower end, near to ground plane which works as a reflector. In case the ground plane conductive and valid in size, the efficiency of the ground plane is as well as a vertically installed dipole
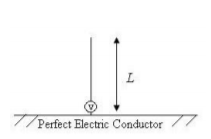
Fig 19 Monopole antenna with length L
There are other common types of monopole antenna such as Whip, helical, T-antenna, and mast radiator. Monopole antenna like dipole antenna both have omnidirectional radiation pattern, for that the monopole it could be used in cell phones and other applications, for example indoor applications such as airplane, or shopping center.
Monopole antennas are widely used in mobile communications, specially, the quarter wave monopole -the length of the monopole L is approximately quarter of wavelength- which is a suitable for MIMO wireless communications systems, due to its low angle radiation and minimized ground losses.
PIFA Antenna
It is called as Planar Inverted F antenna which is most common type of cellular phone antenna now a days, it has the same structure of microstrip antenna but is shorted with the ground because of this short pin the PIFA produce a quarter wavelength. The main reason of name PIFA is because it has change of using wire to use ground plane. The PIFA structure consists of rectangular plane which is installed on the ground plane, it is always parallel to reduce the height. The figure below shows the width W1. The short pin W2 for height is h and the distance between the short pin and the feed point is D.
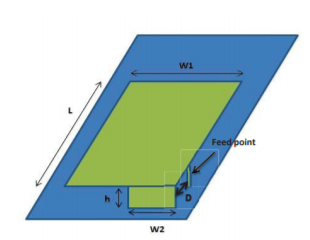
Fig 20 PIFA antenna
The structure of the PIFA can deal with different frequency band
Single band
Multiband
Reconfigurable
The main advantages of using PIFA antenna
1- Due to the small size of PIFA antenna it gives the availability to insert the antenna inside the cellular phone.
2- PIFA has availability to get high gain for both polarization states vertically and horizontally there for it can receive the reflection wave easily from different directions.
3- The backward radiation of the PIFA has be reduced that’s mean the electromagnetic waves power has reduced which leads us to get a good deal to less damage of the human health.
4- The design and the material of the PIFA are not costly on top of that it has a very high efficiency also It is easy to fabricate.
As we know the development of communication always come up with a new evaluation but until now there are no antennas can work without disadvantages, So, there is a problem in PIFA antenna could not be solved until now which is the sensitivity of the bandwidth but in general PIFA prove that is the best seller phone antenna have been used regarding to the
comparing between the advantage and the disadvantage of the antenna. There are a few di-electrical material can be used in PIFA, and when the air is the one which is used, the gain will be better comparing with other material.
Fractal antenna
One of the problems of popular designs of antenna, that’s the antenna which is smaller than a quarter of the wavelength, is very sensitive to a narrow band of frequencies. This problem is a significant issue for mobile phone, where the requirements are always to minimize the size of the mobile phone which leads to the problem of sensitive narrow band frequencies.
Fig 21 Triangle Fractal Geometry. Upper Left: Patch Antenna Fractal. Lower Left: Monopole Fractal. Lower Right: Bowtie Monopole Fractal Antenna
Geometry of fractals
The shape of a fractal can be formed by iterative mathematical process called Iterative Function Systems (IFS) and by using affine transformations as following:
W (x, y) = (ax+by+e, cx+dy+f)
a, b, c, d control rotation and scaling e, f control linear translation by repeating the upper calculations, we get the IFS sequence that converges to the final image.
As shown in figure the fractal antenna has a complex shape which offers many electric current modes to exist, that’s causes, the increasing in radiation, consequently very wide bandwidth. Fractal antenna designs can solve sensitive narrow band frequencies problem. Experiments have shown that antennas built with only a small number of iterations of a fractal process can exhibit sensitivity at several frequencies, and it is worthy to mention that’s fractal antenna can work efficiently more at one quarter of the wavelength than other antennas types.
Key takeaway
Antenna Gain 𝑮 = 𝜺𝑹D
Antenna efficiency 𝜺𝑹 = Pr/Pin
Effective area Ae = (𝝀𝟐 /𝟒𝝅) G
Bandwidth = (fmax – fmin) /fcenter x 100
VSWR = 
References:
[1] Wireless Communications- Principles and Practice, T S Rappaport, Pearson Education India, Second Edition.
[2] Wireless Communication and Networks, Upen Dalal, Oxford university Press, First Edition, 2015.
[3] Wireless Communication and Networks 3G and Beyond, Iti Saha Misra, Tata
McGraw Hill Education Pvt. Ltd, Second Edition, 2009.
[4] Mobile Communication Engineering – Theory and Applications W C Y Lee, TMH Publication, Second Edition, 2008.
[5] Wireless Communication, Andrea Goldsmith, Cambridge University Press, 2005
[6] Fundamentals of Wireless Communication, David Tse and Pramod Viswanath,
Cambridge University Press, 2005




